Большинство роботов обычно созданы для выполнения одной конкретной работы, поэтому они не очень адаптируются к новым ситуациям. Но это может измениться с помощью набора роботов, разработанных исследователями из MIT, Гарвардского, Колумбийского и Корнельского университетов. Эти "роботы-частицы", как их называет команда, представляют собой простые круглые устройства, которые могут соединяться друг с другом с помощью магнитных свойств, чтобы двигаться и работать как пчелиный или осиный рой.
По отдельности роботы довольно просты. Каждый из них состоит из кольца панелей, которые могут расширяться и сжиматься. Это управляется небольшим мотором, батареей и микроконтроллером в основании. Каждый из них оснащен датчиком освещенности и встроенным коммуникатором.

Каждая единица сама по себе не может делать ничего, кроме как расширяться и сжиматься, но, если соединять их вместе, они общаются друг с другом, чтобы двигаться в целом, как единый механизм. Все они имеют магниты вдоль своих краев, что позволяет им свободно цепляться друг за друга, и через скоординированное расширение и сжатие весь рой может перемещаться к источнику света и даже переносить или толкать объекты.
Сама система может быть составлена из практически любого количества роботов-частиц и сконфигурирована в любую необходимую форму. Их можно было расположить в прямую линию, чтобы протиснуться через узкие промежутки, или рассредоточить, чтобы получить больше рычагов и двигаться быстрее. И поскольку они не зависят друг на друга напрямую, один неисправный блок не нарушит работу остальной части единого "организма".
"У нас есть небольшие роботизированные ячейки, которые не могут работать как отдельные элементы, но могут многое сделать как группа", - говорит Даниэла Рус, автор исследования. - "Робот сам по себе статичен, но когда он соединяется с другими частицами робота, коллектив роботов может исследовать мир и контролировать более сложные действия. С помощью этих "универсальных клеток" частицы-роботы могут достигать различных форм, глобальных преобразований, глобального движения, глобального поведения и, как мы показали в наших экспериментах, следовать градиентам света. Это очень мощно."
Особенно интересны алгоритмы, которые управляют этими групповыми движениями. Каждая частица будет ощущать интенсивность света и передавать эту информацию своим приятелям, одновременно прислушиваясь к тем же сигналам от окружающих ее роботов. Частицы запрограммированы двигаться в определенном порядке, подобно мексиканской волне: самые удаленные от источника света сначала расширяются и сжимаются, за ними следуют следующие - самые удаленные, вплоть до крайних.
"Это создает механическую волну расширения-сжатия, скоординированное толкающее и тянущее движение, которое перемещает большой кластер к или от стимулов окружающей среды", - говорит Шугуан ли, первый автор исследования. "Если вы испортите синхронизированные часы, система будет работать менее эффективно."
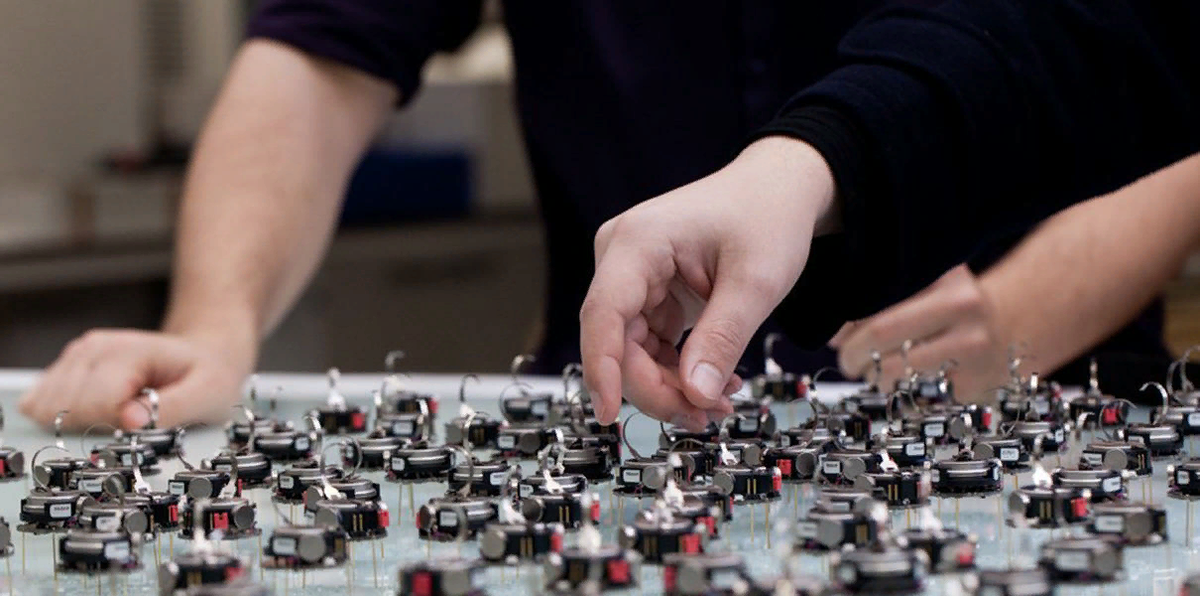
В физических экспериментах команда продемонстрировала, как 24 робота-частицы могут работать вместе, чтобы двигаться, ползти к лампочкам и менять направление при включении и выключении света. В то же время, они способны перемещаться через препятствия, изменять направление движения.
Чтобы показать, что система бесконечно масштабируема, исследователи затем провели моделирование до 10 000 отдельных частиц. Опять же, причудливый метод работал, доводил "рой" до цели, даже в том случае, если целых 20 процентов единиц вышли из строя.
Это далеко не первый раз, когда мы видели "роящихся" роботов. Некоторые из исследователей этого исследования начали с роботизированных кубов еще в 2013 году, в то время как другие команды разработали роботов, которые моделируют рои насекомых. Гарвардской команде удалось получить до 1000 крошечных "частиц", расположенных в заданных формах, и мы видели блочных ботов, способных собираться в 57 различных конфигураций в зависимости от поставленной задачи.
В будущем команда планирует попытаться сделать роботов-частиц более соответствуют своему названию. Долгосрочная цель состоит в том, чтобы сжать компоненты так, чтобы рои могли быть сделаны из миллионов микроскопических роботов-частиц.
Исследование было опубликовано в журнале Nature. Источник: MIT.
Перевод и обработка: КИП