Ученые из Массачусетского технологического института разработали робота, который сам научился играть в Дженгу.
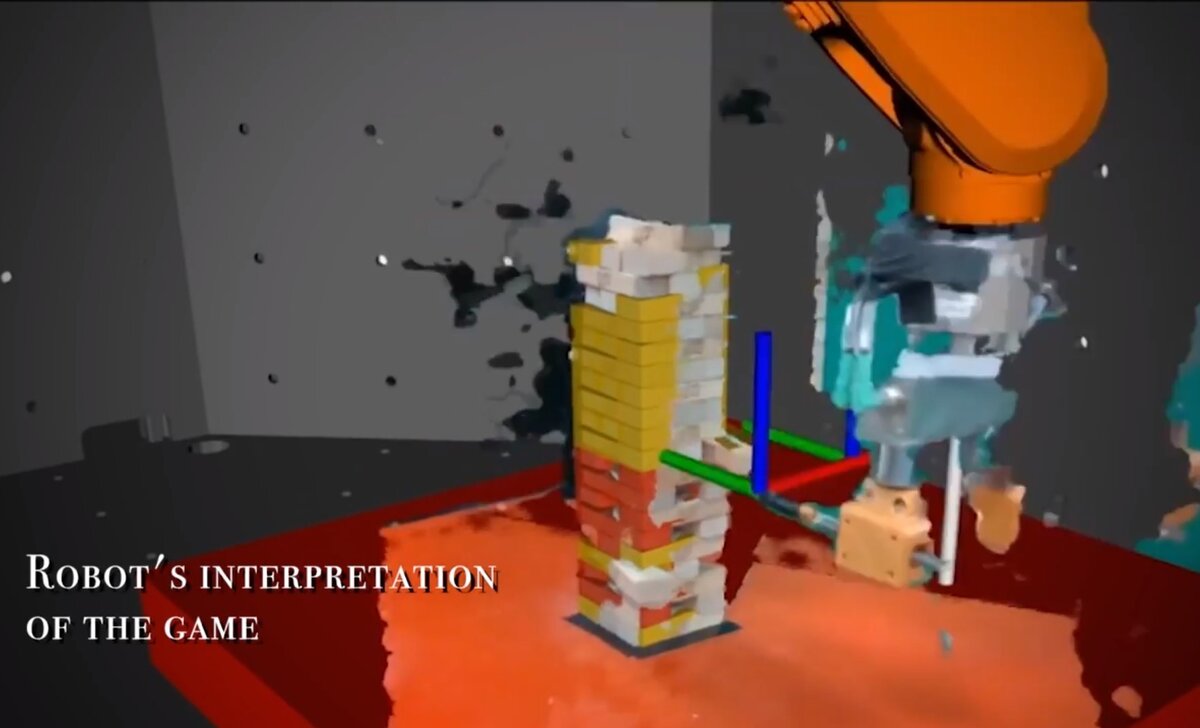
Робот оборудован мягким захватывающим устройством и внешней камерой, которую он использует для того, чтобы увидеть и почувствовать башню. Он анализирует расположение блоков, аккуратно толкает их, компьютер получает визуальную и тактильную обратную связь от своей камеры и захватывающего устройства и сравнивает эти измерения с движениями, которые ранее сделал. В частности, был ли успешно извлечен блок в определенной конфигурации и с какой силой он его толкнул.
В режиме реального времени робот “узнает”, нужно ли продолжать нажимать или переходить на новый блок, чтобы удержать башню от падения.
В отличие от чисто когнитивных задач или игр, таких как шахматы или го, игра в Дженгу требует физических навыков, таких как толкание, вытягивание, размещение и выравнивание фигур. Это очень трудно имитировать, поэтому робот должен учиться в реальном мире, взаимодействуя с реальной башней Дженга. Основная задача состоит в том, чтобы извлечь уроки из относительно небольшого числа экспериментов, используя знания об объектах и физике.
Тактильная система обучения, разработанная исследователями, может использоваться и для других задач, особенно требующих аккуратного физического взаимодействия. Например, отделение перерабатываемых объектов от мусора на свалках или сборку потребительских товаров.
Источник: http://news.mit.edu/2019/robot-jenga-0130



















