Признаюсь честно про этот контроллер от создателя прошивки cleanflight я узнала буквально в последние дни года прошедшего, хотя появился он в продаже еще весной (да проснулась называется). Но поскольку в русскоязычном сегменте интернета про него нету информации, эта статья призвана заполнить данный вакуум.
Я расскажу. что из себя представляет данный полетный контроллер и поделюсь своими мыслями по поводу того, в каких проектах мне кажется целесообразным его применение в 2020 году. Итак - начнем!
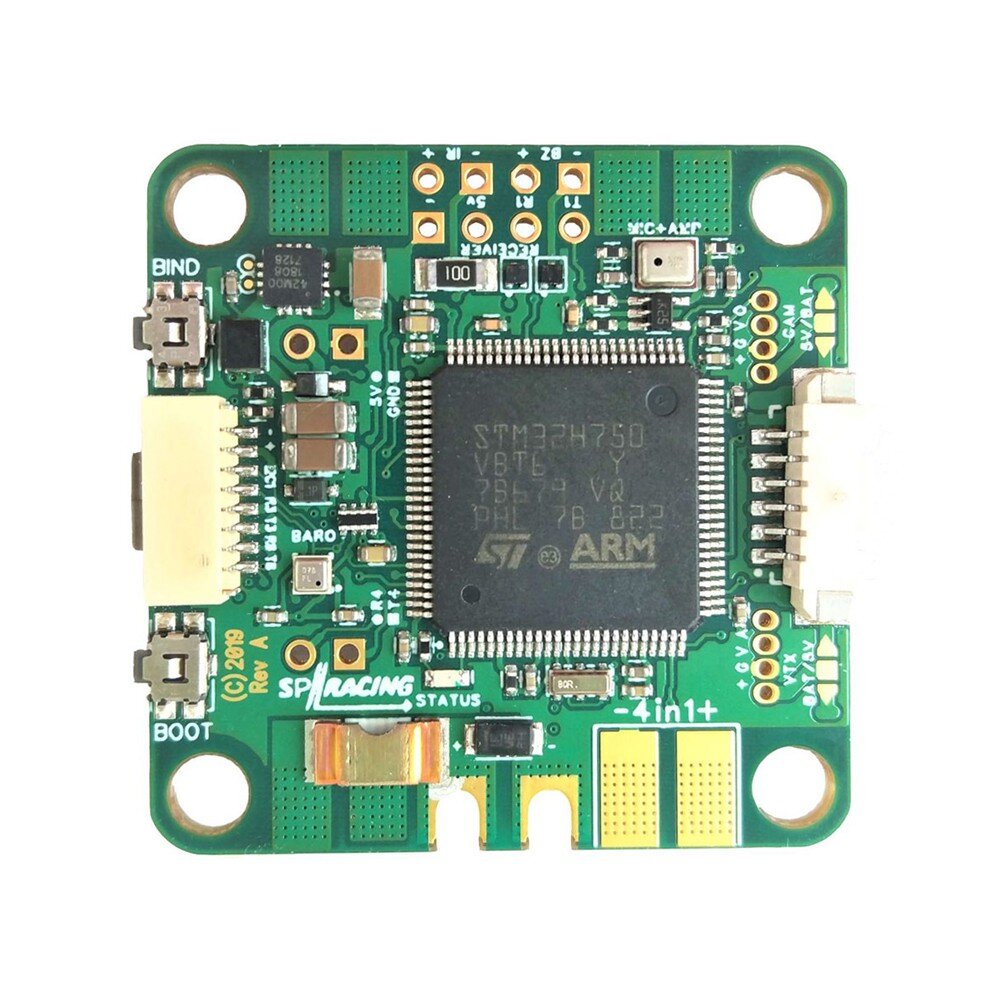
Вопреки моим ожиданиям о номере семейства микропроцессоров, используемых в полетных контроллерах, данная плата имеет обозначение H7, а не F8 (или F10, как перепрыгивали с F4 на F7). Но важна ведь, что из себя представляет сама начинка, а не то, как она называется. Полетный контроллер SP Racing H7 EXTREME оснащен процессором с тактовой частотой аж на 400 МГц, что почти в два раза быстрее, чем у плат на семействе F7 (216 МГц). При том, что мы до сих пор не используем всю вычислительную мощность полетных контролеров на семействе F7 (даже без разгона микропроцессора).
На борту мы имеем встроенный OSD и PDB - ничего удивительного, а как насчет PID-Audio со встроенным микрофоном? Как я понимаю, мы сможем слышать наш квадрик, а именно работу полетного контроллера над моторами по стабилизации модели (можно будет выбрать интересующую ось pitch, roll или yaw с помощью переключателей на передатчике, ). С правильно настроенными пидами звук должен отличаться от случая с неправильной настройкой : чем больше нестабильность (больше ошибок), тем больше изменяется тон, тем меньше ошибка, тем более постоянным становится тон. Идея классная, меня только интересует, завезли реализацию данного функционала в прошивки. В начале это должно появиться в cleanflight (раз уж создатель полетного контроллера и разработчик данной прошивки - одно и тоже лицо), а затем и в betaflight. Я летаю на inav, но не теряю надежды:) Кто в курсе, напишите в комментариях - может данная фича уже реализована в этих прошивках
Два гироскопа ICM20602. И фишка в том, что одновременное использование двух гироскопов положительно сказывается на летных характеристиках, так как в этом случае их показания усредняются и только потом отдаются микроконтроллеру, но SP Racing идет дальше, поскольку теперь два гироскопа ICM20602 снабжены собственным регулятором и дополнены дополнительным высокоемким фильтрующим конденсатором. Это дает гироскопам стабильный источник питания, а следовательно - получаем более точные данные с этих сенсоров. Замечу, что каждый гироскоп имеет свою собственную выделенную шину SPI, которая позволяет осуществлять параллельную передачу данных.
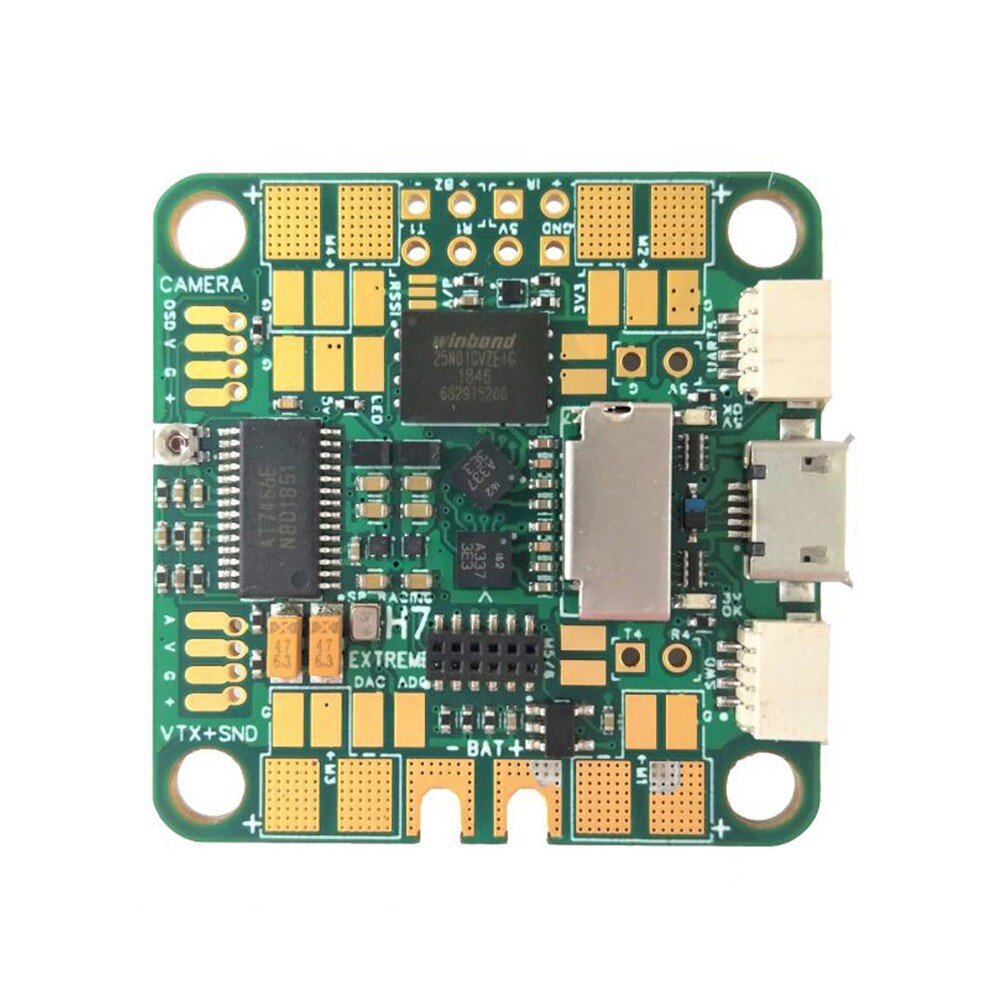
Встроенный 128-мегабайтный флэш-чип предназначен также для хранения кода. Микроконтроллер H7 может выполнять код непосредственно из оперативной памяти, встроенной памяти (правда она мизерная 128 кб) и флэш-чипа.
С барометром тоже удивили: здесь стоит не повсеместно используемый BMP280, а новый BMP388, который конечно меньше, точнее и во всем лучше...тут как говорится покажут только тесты, но я считаю, что прогресс - это однозначно хорошо! Наличие барометра лично меня удивило, потому что SP Racing позиционируют себя, как разработчики гоночных полетных контроллеров, а с наличием барометра на борту и дополнительно подсоединив GPS, мы уже можем дополнительные полетные режимы и настроить сложное поведение квадрика.
По количеству портов мы имеем 6 UART-ов, революции в сравнении с F7 не случилось, но как по мне - этого за глаза хватит. Естественно, все порты являются полностью программно инвертируемыми. А вот с выводами для моторов удивили - 12 штук! Так что октокоптер - не предел:)
Поддержка ИК-приемников...вот вообще не понимаю, нафиг в 2019 году было устанавливать ИК-порт, только стоимость поднимать этим. Лучше бы bluetooth-модуль интегрировали, а так придется пользоваться внешним модулем от speedy bee.
И наверное, последняя из фич - прошивку можно будет загрузить на SD-карту и потом прошиться. Вроде как можно будет параллельно использовать несколько прошивок, настройки будут сохраняться. Но я этого еще не видела, поэтому, как говорится - будем держать руку на пульсе.
Подводя итог вышесказанному, скажу очевидную вещь - полетник классный, по крайней мере - по описанию всех фич и тому, какой производительностью обладает данная железка. На одном из форумов я как-то читала, что на полетных контроллерах F4, F7, задействующих одновременно два гироскопа, нельзя включить RPM-фильтрацию (опять же одновременно на двух сразу) - железо не потянет. Возможно в будущих прошивках проведут оптимизацию, и данная фича будет работать (в конце концов F7 еще можно будет разогнать, так как разогнанного на 245 МГц F4 проца не хватает) А в случае с H7 мы имеем колоссальную производительность, что открывает перед разработчиками широкие возможности по внедрению новых фич. Может когда-нибудь нам достаточно будет просто загрузить в полетник прошивку со встроенной нейронной сетью, указать какой тип и для каких целей мы хотим получить летающую модель, и система сделает все сама. Другим же производителям стоит задуматься о достойном ответе, что естественно положительно скажется на дальнейшем развитии RC-моделей.
Не смотря на то, что SP Racing, как я говорила выше, позиционируют себя, как разработчики гоночных полетных контроллеров, данная плата обладает настолько богатым функционалом, что на ее базе можно собрать абсолютно любой аппарат. Как только появится (а я верю, что это когда-нибудь случится) прошивка под inav- я обязательно её приобрету для экспериментов на своем канале, а может-таки решусь на эксперименты с betaflight:)
P.S. На banggood уже появился конкурент (правда пока нельзя заказать, и я щелкнула по кнопке "уведомить меня о поступлении") в лице Matek H743-SLIM и H743-MINI, так что нас ждет интересный виток в развитии железа для нашего хобби!