Всем здравствуйте. Импульсные регуляторы скорости обычно используются для управления двигателями постоянного тока. Преимущество импульсного управления перед линейным управлением заключается в снижении потерь мощности на собственное регулирование и, кроме того, в сохранении крутящего момента двигателя.
При линейном управлении ток или напряжение, при которых подается питание на двигатель, ограничены, в то время как «теряется» на силовом элементе контроллера. Это рассеивание мощности, которое может достигать нескольких ватт даже с небольшими двигателями. И это одна из самых больших проблем линейного управления, потому что даже 10Вт представляют собой значительное выделяющее тепло на управляющем элементе.
Импульсные контроллеры в основном можно разделить на простые и с обратной связью. Обратная связь используется для стабилизации скорости. Это выгодно, когда необходимо обеспечить постоянную скорость двигателя независимо от его нагрузки или необходимо установить определенную скорость. В рассматриваемой схеме будет достаточно простого регулятора для небольших двигателей.
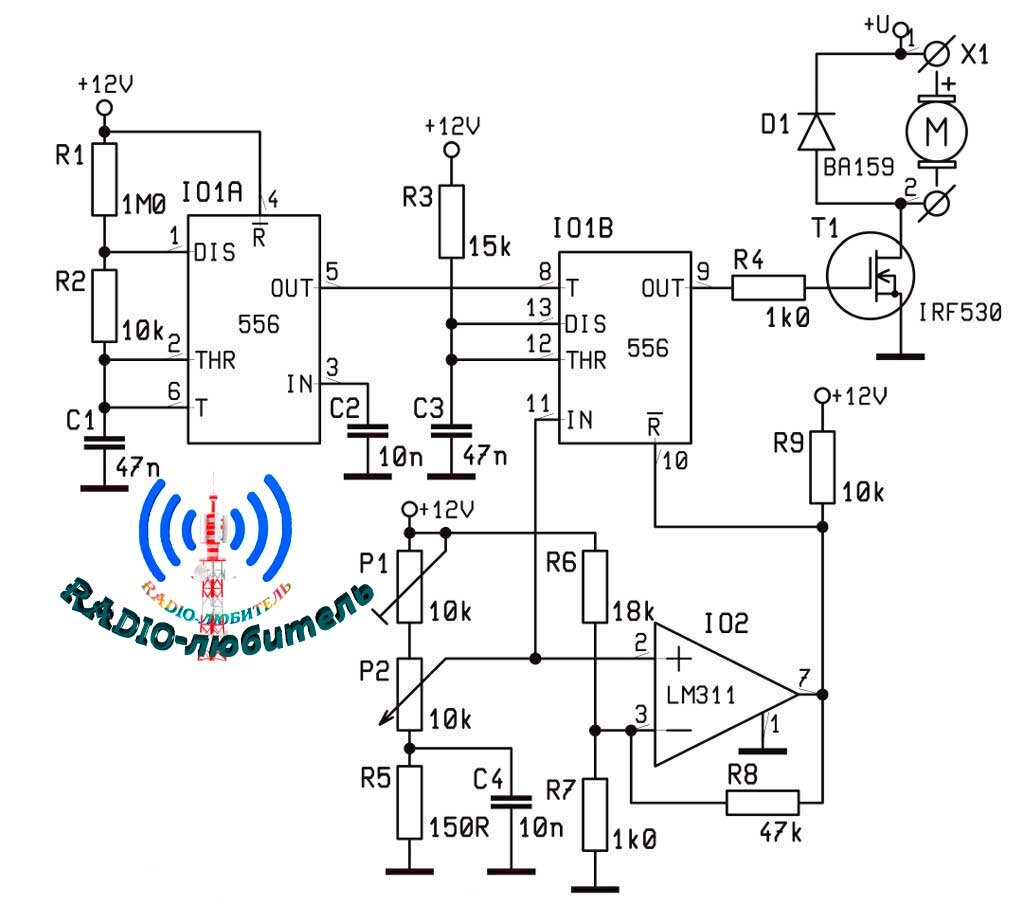
Первым каскадом схемы управления скоростью является нестабильный мультивибратор, построенный наг половине таймера 556. Это не что иное, как два известных независимых, много раз описанных таймеров 555. Время зарядки задается R1 + R2 и емкостью C1, только R2 применяется вне конденсатора во время разряда. С компонентами в соответствии на схеме генератор генерирует частоту 30,1 Гц.
По приходу фронта управляющего импульса на вход T начинается заряд конденсатора C3 через резистор R3. Во время зарядки выход находится в состоянии высокого логического уровня и тем самым открывает транзистор T1. Таким образом, двигатель постоянного тока, запускается импульсами длительностью около 0,8 мс и частотой 30,1 Гц. Однако это применимо только в том случае, если не используются другие цепи. Хотя сейчас много готовой продукции продается регуляторов ознакомится можно ниже.
Управление скоростью происходит таким образом, что импульсы меняют скважность. Следовательно, это широтно-импульсная модуляция управления двигателем с ограничением минимальной длины импульса, так что двигатель не получает импульсов меньше, чем достаточно для его работы.
Как известно, заряд и разряд синхронизирующего конденсатора происходит при штатном включении нестабильного мультивибратора (одновибратор) в диапазоне от 1/3 до 2/3 напряжения питания, в нашем случае от состояния полного разряда до 2/3 напряжения питания. Эти уровни контролируются двумя компараторами, которые получают свои опорные напряжения от трех резисторов, последовательно включенных между источником питания и землей. Схема стабилизатора питания регулятора на рисунке.
Резисторы имеют номинал 3 × 5 кОм в нормальном биполярном исполнении. Для версии C-MOS это значение установлено на 3 × 100 кОм, чтобы снизить потребление. Верхнее опорное напряжение, то есть 2/3 от напряжения питания, выводятся как IN и обычно используются для фильтрации. В нашем случае это напряжение подается на делитель, образованный подстроечным резистором P1, потенциометром P2 и резистором R5. Это создает два делителя, соединенных параллельно, и в результате верхний уровень смещается в зависимости от положения потенциометра.
Чем ниже это значение, тем раньше заканчивается заряд синхронизирующего конденсатора и, следовательно, тем короче выходные положительные импульсы, и наоборот. При использовании таймеров C-MOS схема также будет работать, только характер регулирования немного изменится, потому что сопротивления потенциометра и подстроечного резистора больше не будут применяться параллельно, а будут «принудительно» передавать свое напряжение непосредственно на вход IN.
Неинвертирующий вход компаратора IO2 подключен к потенциометру, инвертирующий вход имеет включен в делитель R6 / R7. Открытый коллектор выходного транзистора компаратора подключен к входу сброса одновибратор IO1B. Если бегунок потенциометра находится в таком положении, что его напряжение выше, чем напряжение, поступающее с делителя R6 / R7, выходной транзистор компаратора закрыт, и на нулевом входе IO1B имеется положительное напряжение с резистора R9.
Если напряжение с коллектора падает ниже уровня инвертирующего входа, компаратор переворачивается, его выходной транзистор открывается, и напряжение на нулевом входе IO1B близко к нулю. Это приводит к блокировке мультивибратора. Напряжение на инвертирующем входе компаратора также зависит от резистора обратной связи (R8), который вводит определенный гистерезис, поэтому на бегунке потенциометра требуется немного более высокое напряжение, чем было достаточно для блокировки.
Частью схемы также является уже упомянутый подстроечный резистор P1, который определяет диапазон регулирования потенциометра P2. Источник постоянного тока контроллера может находиться в диапазоне от 12В до примерно 24В. Компаратор и таймеры не зависят от напряжения, они будут хорошо работать при любом напряжении, но в этом случае, когда речь идет об импульсах для двигателя, вводится стабилизация, которая работает на более высоких напряжений. Монтаж контроллера выполнен на односторонней печатной плате.
Транзистор Т1 оставляем установленным немного выше на плате, чтобы можно было при необходимости прикрепить к нему небольшой радиатор. Хотя это полевой МОП-транзистор импульсного режима и теоретическое падение напряжения на нем почти равно нулю (определяемое произведением протекающего тока и внутреннего сопротивления в замкнутом состоянии, составляет порядка 0,1 Ом), большие потери мощности вызваны "медленным" переключением и открытие перехода транзистора, при котором кажущееся сопротивление перехода изменяется линейно.
Настройка очень простая и с ними справится даже начинающий радиолюбитель. Сначала подключите напряжение питания к клеммам X2 и проверьте общее потребление, ток которого не должен превышать 10 мА. Далее подключаем управляемый двигатель к клеммам X1 и проверяем работу регулятора плавным вращением потенциометра сопротивления P2. Затем мы можем установить минимально допустимую скорость с помощью подстроечного сопротивления P1. Если у нас есть осциллограф, мы можем увидеть форму управляющего сигнала на выходе OUT IO1B. Вот на этом и все всем спасибо за уделенное время.