Всем добрый день!
В предыдущей статье Гусеничный снегоуборщик Горыныч. Часть 2. Рожденный заново я пытался донести общую концепцию новой платформы и основные ее механизмы.
В этой статье подробно остановлюсь на схеме электроники и ее компонентах, а так же расскажу о проблемах, с которыми столкнулся при сборке платформы.
В первой версии были следующие компоненты:
- Arduino Mega 2560
- Monster Moto Shield (30 амперный драйвер управления коллекторным двигателем) - очень интересная плата расширения для Arduino, драйвер содержит защиту по току, умеет мерять ток нагрузки.
- 16-ти канальный ШИМ контроллер на базе pca9685 - это просто в шим контроллер, который требует подключение всего двух проводов к Arduino.
- преобразователь напряжения из 12 вольт в 5 вольт
- радиомодуль nrf24l01
- Сервоприводы MG996R - 2 шт. (для управления заслонками ), усилий данных сервоприводов достаточно для управления дроссельной и воздушной заслонками.
- Сервоприводы DS3218 -2 шт. (для управления бортовыми тормозами). Изначально на тормозах стояли MG996R, т.к. не знал какие усилия нужны для нормального функционирования тормозов. Позже, в процессе испытаний было определено, что MG996R имеет недостаточный крутящий момент. В ходе поисков в интернет-магазинах были найдены DS3218, их крутящего момента достаточно для оптимального функционирования тормозов.
- Светодиодная лента на RGB светодиодах - использовалась в задних фонарях
- Драйвер управления двигателями на L298N драйвер был в наличии и им просто управлять RGB светодиодной лентой.
- Линейный актуатор - обычный дешевый китайский актуатор, использовался в качестве цилиндра подъема отпускания ножа.
- Генератор ВАЗ - 2107 - обычный генератор, который никак не переделывался, используется для заряда аккумулятора и питания всех электрических потребителей.
Остановлюсь на проблемах, которые настигли в начале постройки.
Аппаратура управления - изначально использовалась самодельная, на базе Arduino и радиомодулей NRF24L01. Данные радио модули очень капризны к питанию, приходилось делать различные фильтры, отдельные преобразователи. Джойстики на аппаратуре были тоже далеки от идеала. В результате решено было приобрести заводскую аппаратуру FlySky FS-i6x? , бюджетная 10-ти канальная аппаратура.
Наводки (помехи), создаваемые двигателем внутреннего сгорания. Это была чуть ли не одна из проблем, по которой проект чуть не был заброшен. Боролись с данной проблемой целыми группами, помогали с форумов, знакомые электронщики. Мы и экранировали все, и меняли преобразователи, и ставили фильтры. В ходе борьбы Arduino Mega была изолирована как по питанию, так и по всем управляющим цепям, но все данные работы не приносили результата. Из-за помех, контроллер сбоил, перезагружался, платформа ездила куда попало, что недопустимо и опасно.
В результате было решено сменить Arduino Mega 2560 на Arduino Nano и попробовать будет ли от данной смены какая-то польза. Вы не представляете то ощущение, когда найден выход в такой битве!
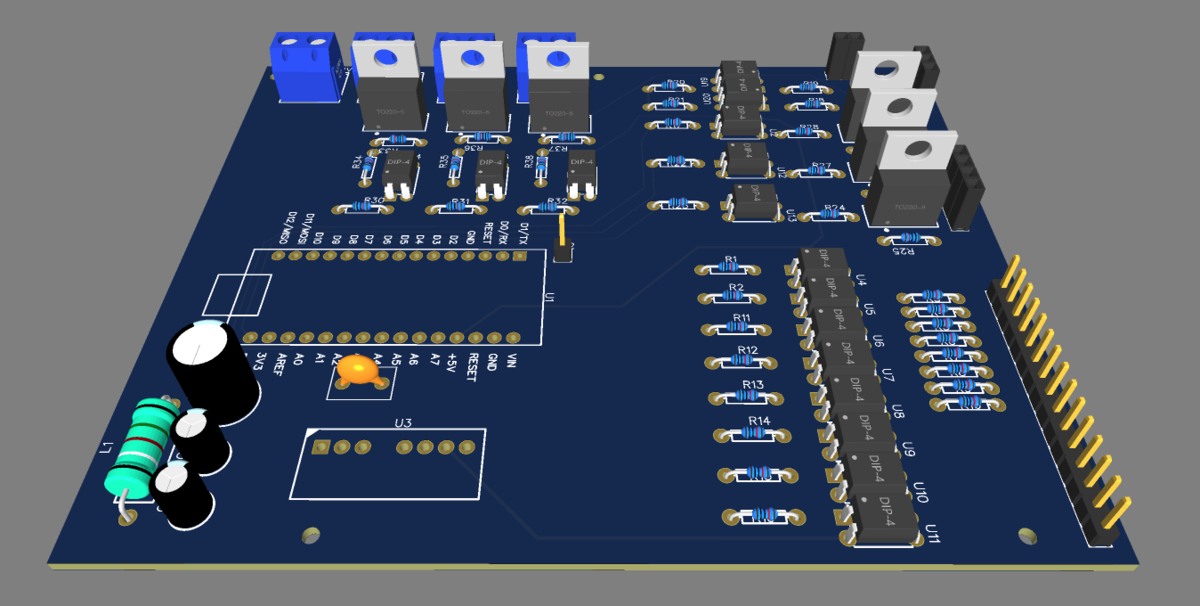
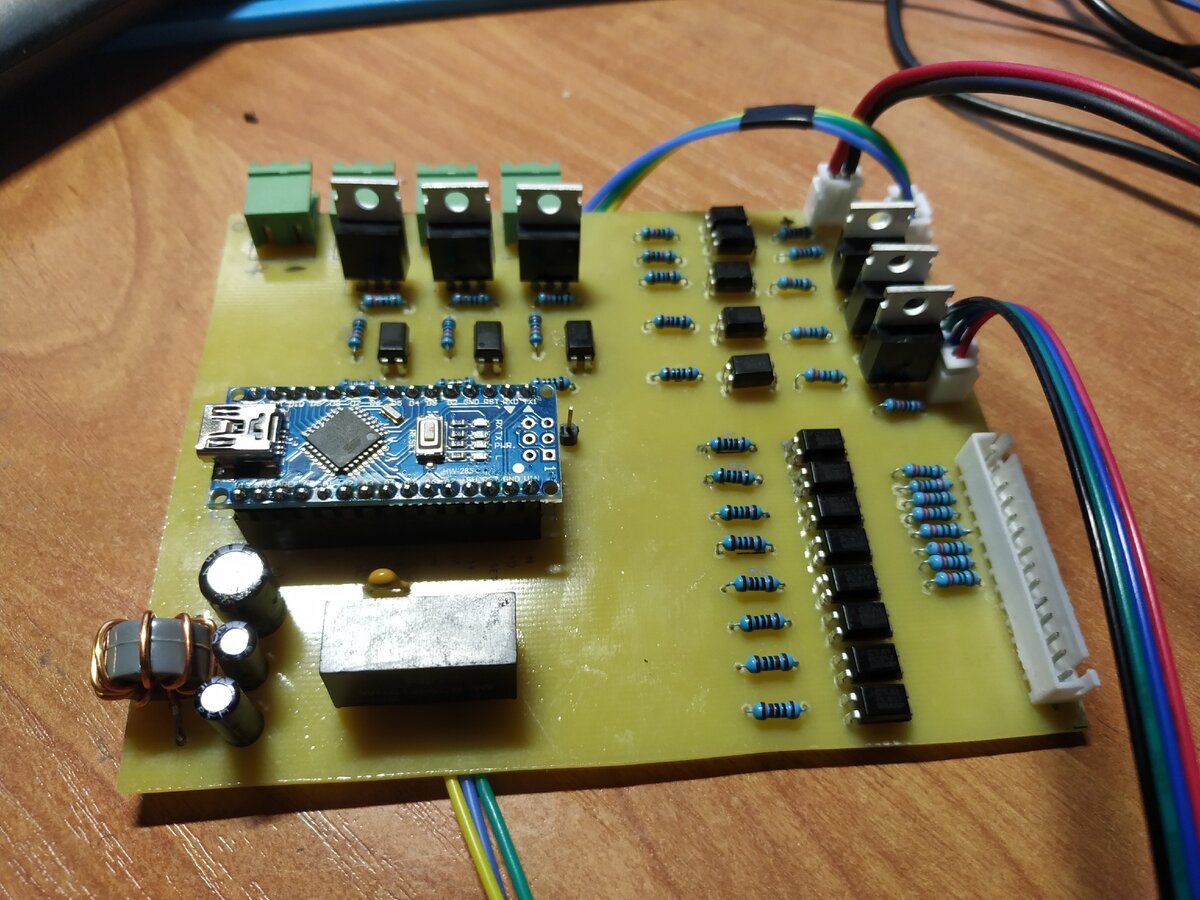
На Arduino Nano все заработало стабильно, но была еще одна проблема. Количество портов ввода/вывода у Arduino Nano на порядок меньше, и нужно оптимизировать все управляющие линии так, чтобы уложиться в это небольшое количество. Поэтому была спроектирована и изготовлена новая управляющая плата.
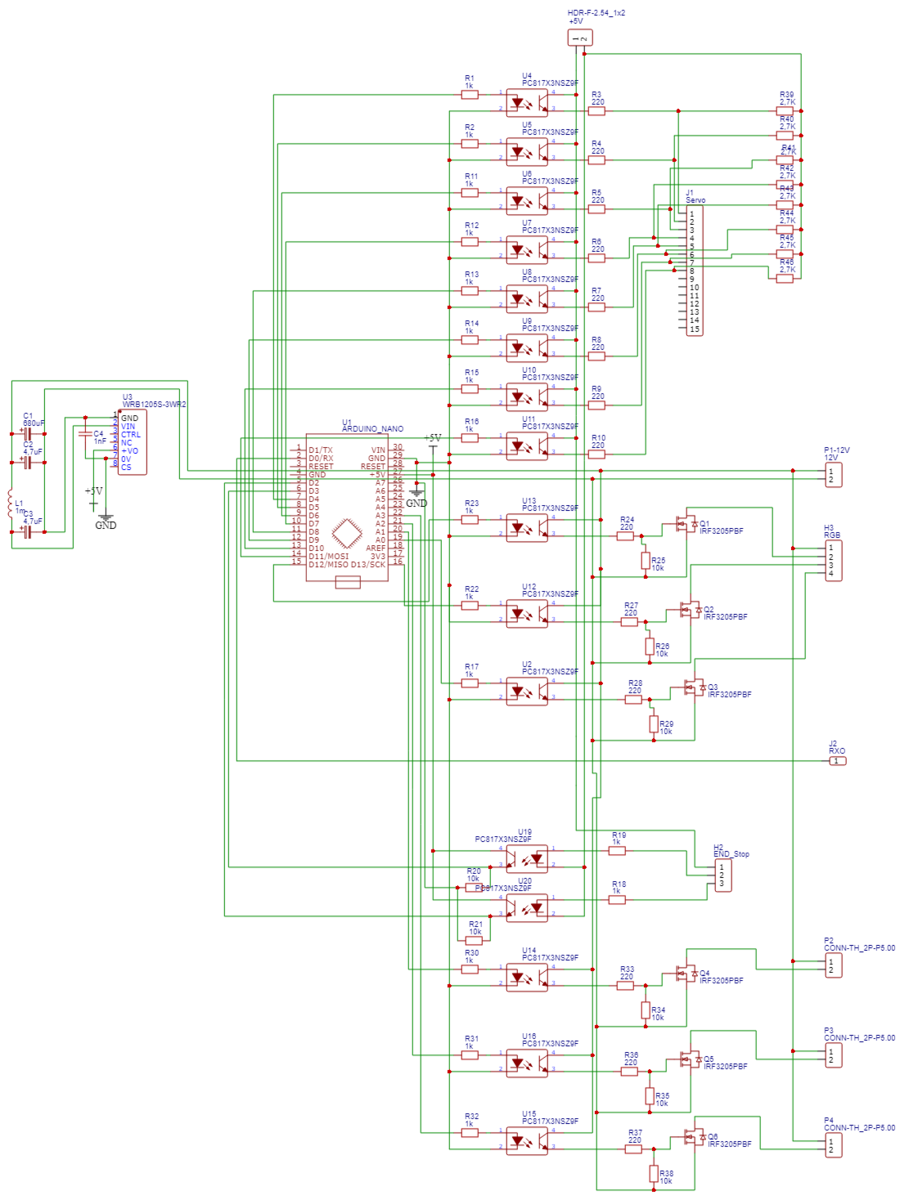
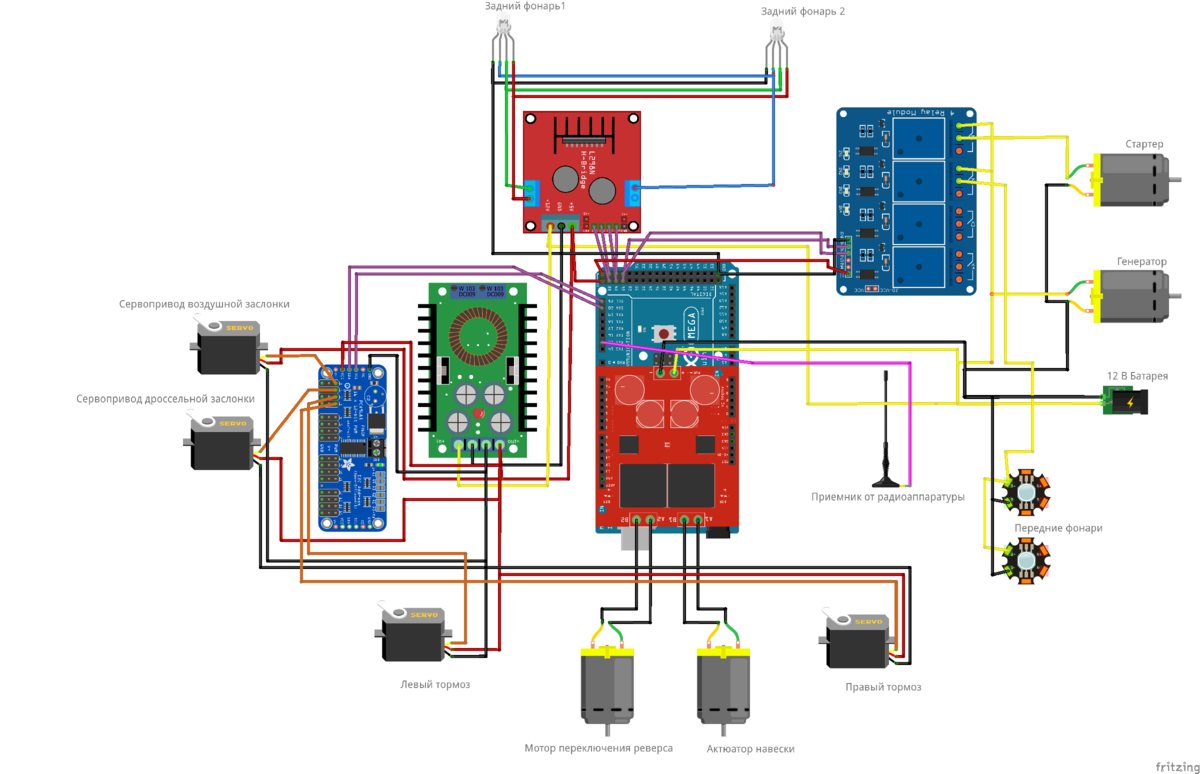
На текущий момент электрическая схема выглядит так
Я намеренно убрал из схемы резисторы и прочую обвязку, чтобы не перегружать ее. Как видно из схемы, некоторые компоненты не подключены. На самом деле это так, плата проектировалась как временная, для тестирования и отладки, поэтому есть неиспользуемые силовые выводы.
Сразу отвечу на вопрос: почему не использовать приемник от аппаратуры вместо Arduino?. Потому что для некоторых задач нужно выполнение некоторой логики и Arduino берет это на себя.
Я попытался в статье разъяснить какие используются компоненты и как взаимодействуют между собой. Если нужно что-то уточнить, жду ваших комментариев.



















