Всем здравствуйте. Возможности управления двигателями постоянного тока уже не раз обсуждались во многой литературе и в интернете. Так называемое ШИМ-управление (широтно-импульсная модуляция) кажется наиболее выгодным с точки зрения энергопотребления, диапазона регулирования скорости и управления крутящим моментом. Большой процент из них использует известные микросхемы NE555 (или их версии NE556) для генерации импульсов. Схема ШИМ-регулятора представлена на рисунке.
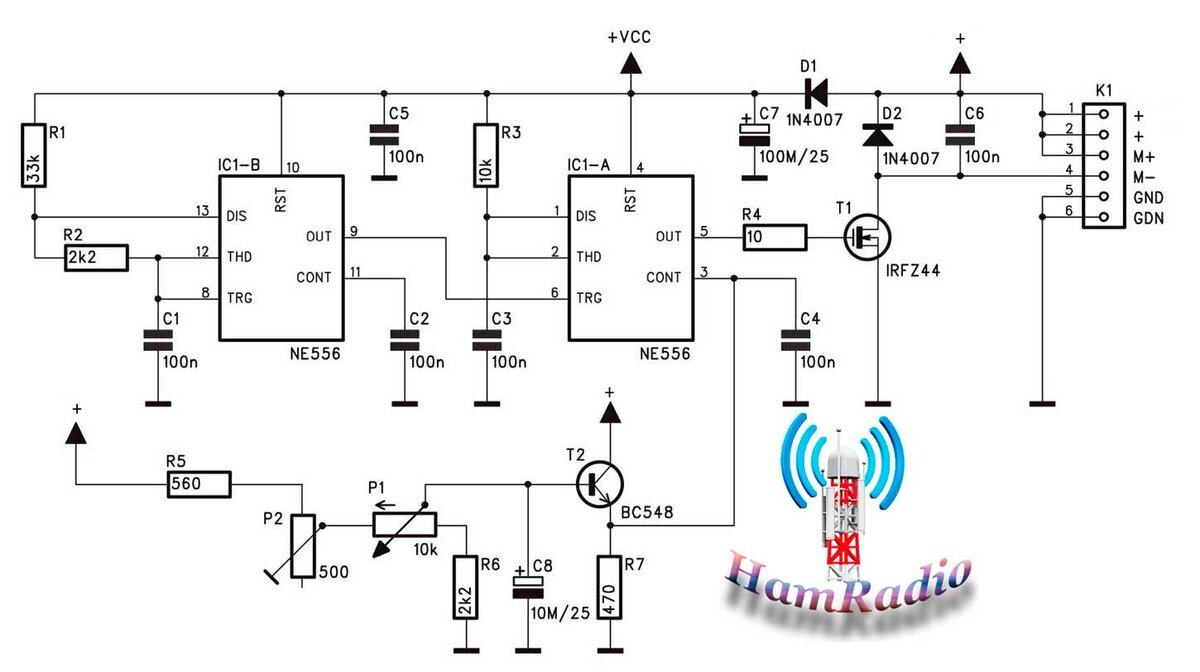
Схема состоит из пары таймеров в одном корпусе NE556. Первый, IC1B, подключен как нестабильный мультивибратор. Его частота определяется внешними компонентами и составляет около 410 Гц. Второй таймер IC1A работает как одновибратор, который запускается выходом схемы IC1B.
Длина выходного импульса таймера IC1A зависит от напряжения, приложенного к управляющему входу CONT IC1A (контакт 3). Это напряжение берется с транзистора T2, который управляется потенциометром P1. Подстроечным резистором P2 устанавливается максимальная скорость (полное выходное напряжение) при полном выкрученном потенциометром P1. Относительно небольшой эмиттерный резистор T2 гарантирует низкий выходной импеданс на управляющем входе IC1A.
Выход второго таймера IC1A напрямую управляет затвором транзистора T1 MOSFET IRFZ44. Характеризуется очень низким сопротивлением канала в закрытом состоянии. Напряжение питания и подключение двигателя выведены на один разъем K1. Максимальное напряжение питания составляет +18В и ограничивается предельным напряжением питания таймера NE556.
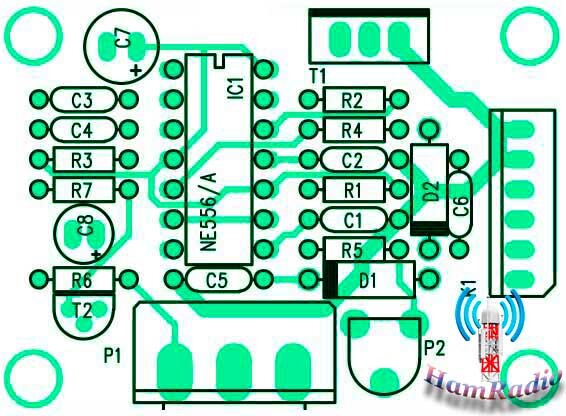
Схема управления двигателями постоянного тока выполнена на двухсторонней печатной плате с размером 48х35 мм. Расположение компонентов на печатной плате, а также разводка проводников изображена на рисунке.
После проведения монтажа и поверки на возможные дефекты. Подключите напряжение питания и, если имеется осциллограф, проверьте выход IC1B. Подключите двигатель, установите потенциометр 1 на максимум и настройте максимальную скорость с помощью подстроечного резистора P2. Они должны быть достигнуты, когда P1 полностью выкручен на максимум. На этом настройка регулятора завершена.
Описанный контроллер позволяет управлять частотой вращения двигателей постоянного тока практически во всем диапазоне, т.е. от нуля до максимальной скорости при номинальном напряжении. Если нам нужно подать на двигатель более высокое напряжение, мы должны отделить питание двигателя от управления. Контроллер содержит минимум компонентов, и его конструкция может быть выполнена даже начинающими радиолюбителями. На этом все всем спасибо.