Как мы знаем, любое устройство, будь оно механическим, пневматическим или электронным имеет свой алгоритм действия.
Например утюг это система регулирования, но вопрос вполне простой, замкнутая это система регулирования или разомкнутая.
Большинство из вас скажут, конечно замкнутая и будут правы. А вот другой пример.
Миксер замкнутая система управления или разомкнутая, особенно тот у которого нет регулировки скорости вращения. В данном случае система будет разомкнутая.
В чем же разница спросите, всё на самом деле просто.
Начнем с блок схемы разомкнутой системы управления.
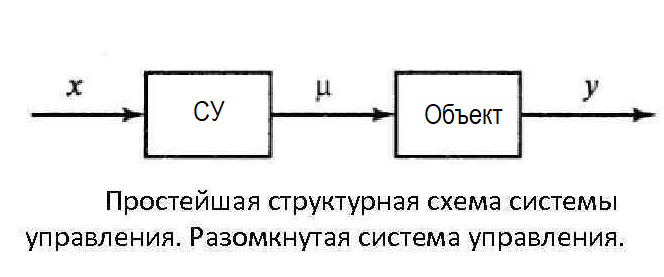
СУ - система управления и объект.
Как видим у нас есть воздействие на СУ(систему управления), которая подает воздействие на объект. При этом сама СУ "не знает" о том, что происходит с объектом.
Вернемся к нашему миксеру. Самому простому. У нас есть на нем три кнопочки: Выкл, Средние обороты, Большие обороты. То есть нажав на любую из трех кнопок, мы получим результат в виде работающего миксера или выключенного. В таком случае, если миксер дешевый, то СУ не знает, что там происходит с самим двигателем, вращает или нет, за неё это контролирует человек. Если мотор зафиксировать, то миксер скорее всего выйдет из строя, так как команда не остановится, команда управления будет идти постоянно. Так как обратная связь (ОС) отсутствует.
Такая система достаточно проста в реализации, но не надежна и имеет простое исполнение, что в итоге отражается в низкой себестоимости.
А теперь перейдем к замкнутой системе.
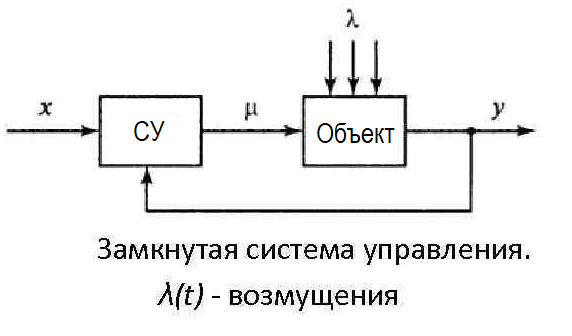
На рисунке появилась еще одна связь с выхода на вход. Как правило для четкого управления или регулирования (это совсем не одно и то же) используется отрицательная обратная связь (ООС).
Классическим примеров такой системы является обычный утюг. Электрический, конечно. У нас есть вилка питания на утюге и регулятор температуры - по сути термостат. В нашем случае термостат и будет СУ для нашего утюга.
Объектов в этом случае будет спираль нагрева, которая ограничивается по питанию при достижении заданной температуры. Но это только при использовании термостата. Как только он остынет, термостат сработает и снова пойдет нагрев.
Но управление может быть и микропроцессорным, тогда алгоритмы будет немного другим, но общая модель регулирования в целом не изменится.
Когда утюг холодный, контроллер запускает на него максимальный ток, по мере приближения к заданной температуре, ток будет снижаться. Но стоит заметить, что на холостом ходу(когда утюг просто включен), для поддержания заданной температуры так же будет необходим небольшой ток.
Теперь к возмущающему воздействию, в нашем случае лямбда. Идея регулирования состояит в том, чтобы система работа по заданному режиму не смотря внешние факторы. Так например, стоит утюг, отдыхает, то к потребления 2% (условно). Достали мы рубашечку, теплосъём возрос, поверхность начинает остывать, контроллер мгновенно начинает компенсировать потерю тепла(пусть будет 30%). А тут еще джинсы постирались и сушить некогда, поэтому утюгом сразу и просушим.
Как вы понимаете, воздействие на утюг влажной тканью будет максимальным. Но микроконтроллер отреагирует и подаст мощность, максимально необходимую. в итоге, при глажке, мы не ждем, когда поверхность прогреется, а продолжаем гладить.
Самое интерсено что такой принцип регулирования используется во многих направлениях. В управлении, экономике, логистике, но многие почему-то не понимают этого или отказываются.
Есть такой предмет ТАУ, который очень точно позволяет описать большинство технических процессов, да и социальных тоже.
Пишите в комментариях примеры замкнутых или разомкнутых систем, это покажет на сколько понятно или нет описано.
Всех с наступающим.