С Наступившим Новым годом! У большинства читателей начались продолжительные выходные и сейчас меньше всего хочется разбираться с серьезным материалом. В развлекательных целях предлагаю ознакомиться с одной областью техники, получившей в настоящее время повышенный уровень внимания. Речь пойдет о технологии лазерного сканирования LiDAR (Light Detection and Ranging), вернее будет сказать, что это технология обнаружения препятствий и определения дальности до них.
В связи с чем столько шумихи?
Как и все мероприятия, организованные известной компанией Apple, недавняя презентация продукции с "новой" технологией наделала много шума. Приложение Snapchat начало использовать технологию для улучшения эффектов дополненной реальности.
Мне одному показалось, что тут что-то не так?
Устройство лазерного дальномера
Описанный выше способ сканирования окружающего пространства базируется на множестве измерений расстояния до элементов этого самого пространства. В свою очередь, измерение расстояния это измерение времени, за которое проходят волны (звуковые или радио) чтобы достичь объекта, а потом вернуться назад к источнику. Избитая формула хорошо знакома всем вплоть до лицеистов-гуманитариев.
Дистанция до объекта равна скорости света, умноженной на время его прохождения туда и обратно и все это делить на два. Расстояние в 5 метров до объекта и обратно свет пройдет за 66 наносекунд. Посмотрим на знаменитый айфон.
Если никаких подозрений не возникло, то движемся далее...
Немного коснемся истории. Лазерный дальномер, как и все перспективное, начал использоваться в оборонной сфере. Исходя из возможностей существовавшей тогда элементной базы и требуемых характеристик военной техники представлял собой нечто грандиозное.
Система управления дальномером командовала блоком питания, который заставлял лазер испускать короткий импульс, при этом сбрасывался измеритель временного интервала. По приходу отраженного светового пучка в приемник измеритель временного интервала останавливался и выдавал на индикатор измеренное расстояние. Для автоматизации наведения орудия на цель в танковом дальномерном прицеле ТПД-К1 напряжение, пропорциональное измеренному расстоянию поступает в систему управления. Для справки: прицел имеет массу 66 кг. Естественно, технологии не стояли на месте и за полвека придумано множество полупроводниковых материалов, но вот элементарная физика, лежащая в основе расчетов никак не поменялась.
Первое, что понятно - для измерения расстояния необходим узконаправленный пучок излучения. Если бы мы имели дело не с узконаправленным лазерным лучом, то в приемник приходила бы смесь отраженных лучей от каждого элементарного элемента объекта, входящего в пучок. Со смесью отраженных лучей работать гораздо тяжелее. Напоминаю, что мы еще и близко не подошли к вопросу сканирования окружающего пространства.
Триангуляция
Еще одним способом измерить расстояние, не прибегая к измерению времени является, так называемый, триангуляционный способ. В его основе всеми любимая геометрия 7 класса средней школы (и совсем немного оптики).
Отраженный от объекта луч лазера приходит на светочувствительную матрицу видеокамеры, где делает засветку. При удалении объекта от дальномера на расстояние d засветка произойдет в строго отведенном месте матрицы. Однако, при удалении объекта на расстояние D положение засветки на матрице изменится.
Расстояние до объекта вычисляется путем обработки изображения. Как только объект уходит от луча лазера в любую из сторон - измерение не может быть проведено. У смартфона имеется камера и даже три с высоким разрешением, однако, как вы поняли, в этом методе также абсолютно необходимо наличие узконаправленного луча света.
Существует еще способ с модуляцией светового пучка, но пучок обязательно должен быть.
Сканирование
Теперь переходим непосредственно к сканированию. В обычной жизни для развертки луча используется механическое вращение лазера и камеры внутри цилиндра.
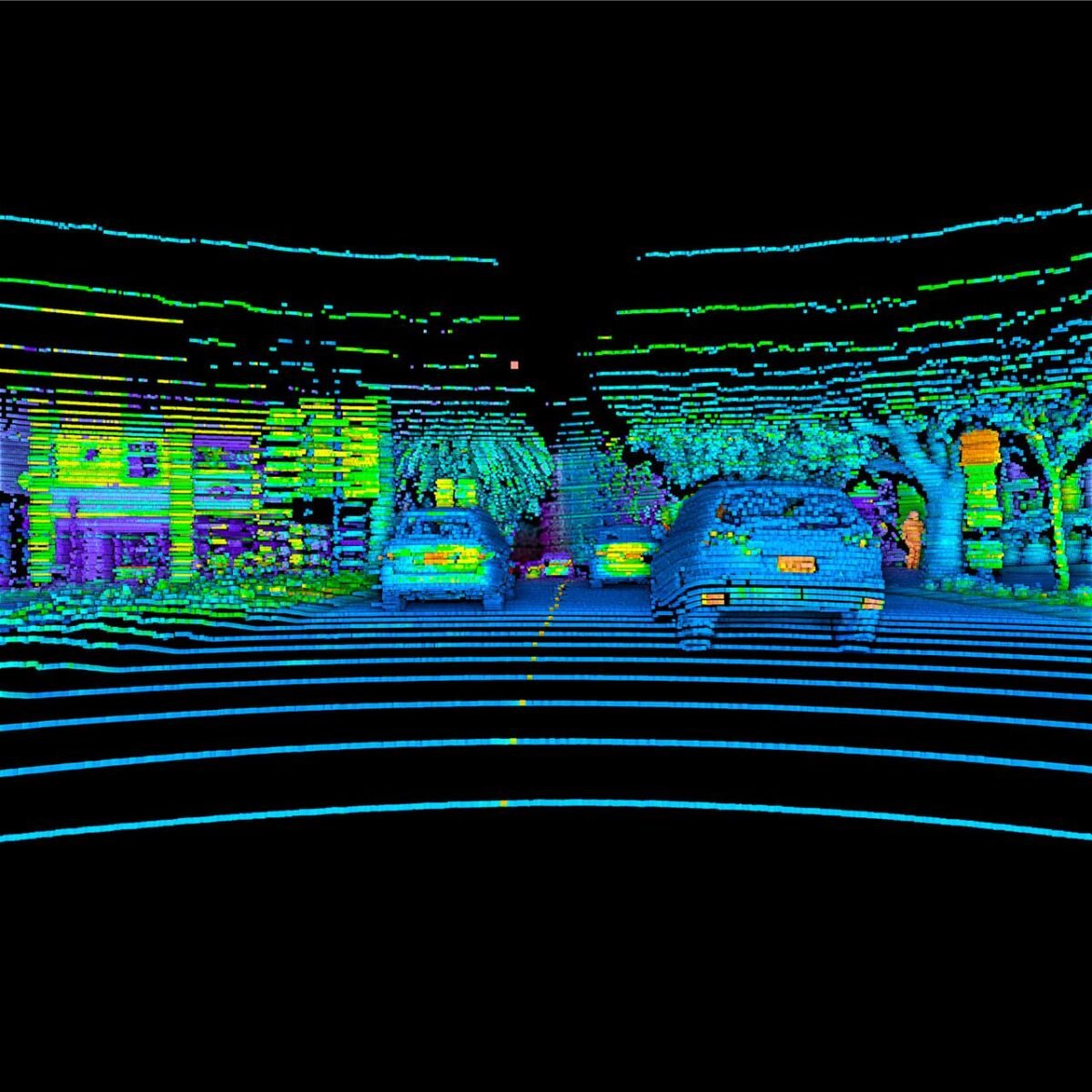
При такой развертке LiDAR видит местность как совокупность засветок ближайших предметов при пересечении с ними луча лазера. Дальнейшая работа это вычисления, связанные с обработкой большого массива данных с целью восстановления 3D модели окружающего пространства.
Необходимо разобраться в следующем: при наличии трех камер с высоким разрешением что более правдоподобно - использование однофотонных лавинных диодов (SPAD), как заявляет производитель или триангуляция c использованием камер? Тут конкретно непонятно то, каким образом движение электронов в диоде преобразуется в число наносекунд задержки времени.
А самый главный вопрос - каким образом происходит развертка узкого пучка света? Чтобы получить 3D модель окружающего пространство необходимо чтобы луч света не просто покоился в руке владельца телефона, а пробегал по части сферы, не оставляя без внимания ни один уголок пространства.
Судя по видео, развертка происходит явно не с помощью рук человека. Давайте общими усилиями разберемся что за чудеса происходят с полупроводниковой техникой.
Поддержите статью лайком если понравилось и подпишитесь чтобы ничего не пропускать.
Также не обойдите вниманием канал на YouTube. Подписки и лайки будут приятным ответом от аудитории.