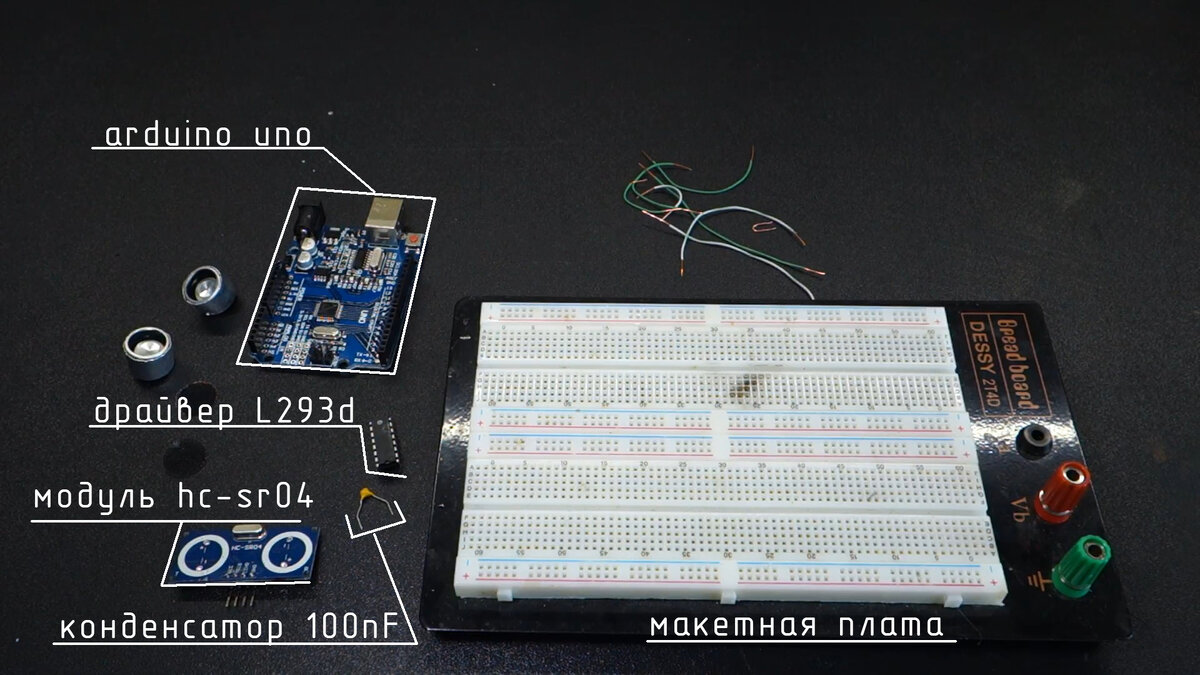
Для создания этого проекта нам понадобятся:
1) Arduino Uno или Arduino Nano (китайские аналоги тоже подойдут, ведь они ничем не отличаются.
2) Модуль модуль HC-SR04 ( ультразвуковой датчик расстояния).
3) Один драйвер двигателей L293D.
4) Конденсатор 100 нанофарад.
5) Макетная плата.
Перед тем как приступить к сборке, из модуля HC-SR04 нужно выпаять ультразвуковые вибраторы и снять с них сеточки.
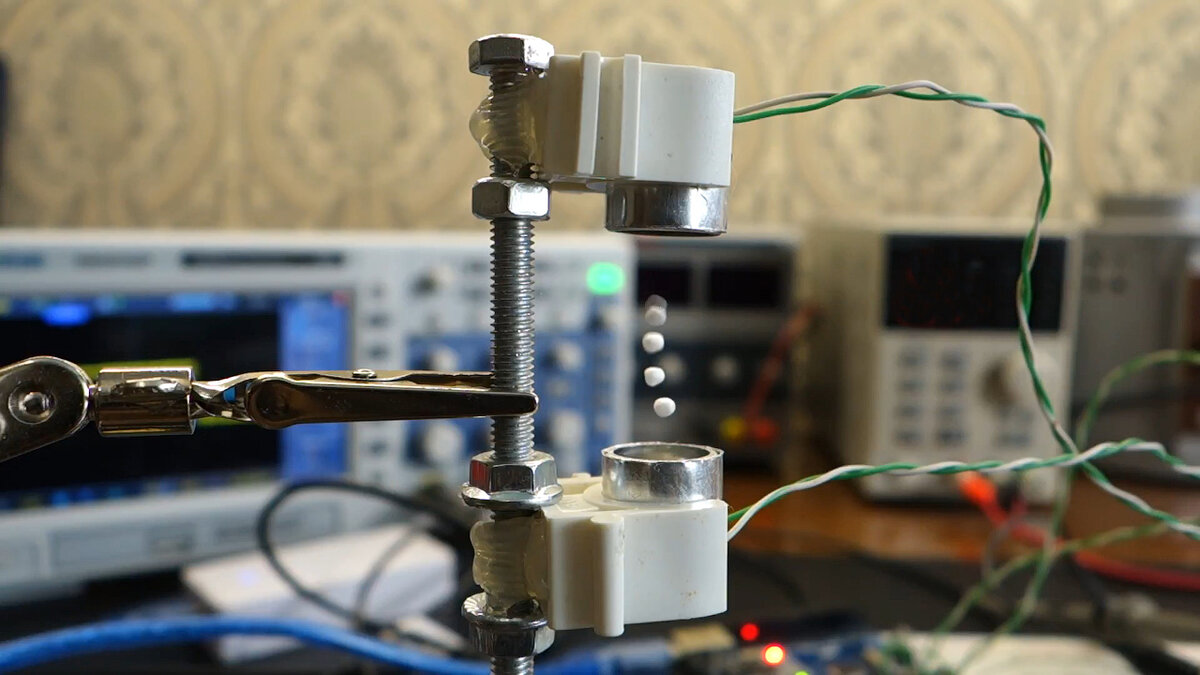
В процессе сборки ультразвуковые вибраторы крепятся вертикально друг на против друга. Расстояние между ними должно быть кратно половине длинны волны которую можно найти по простой формуле: нужно разделить скорость звука на частоту с которой работает наша система. 33000 см/с скорость звука / 40000 Гц = 8,25 мм. Вот и расстояние между датчиками. Осталось прошить arduino и подать питание.
Если при включенном левитроне в область между вибраторами поместить пенопластовый шарик то он зависнет в воздухе.
Также прилагаю код для ардуино:
byte TP = 0b10101010; //Порт 2. Порт получает обратный сигнал
void setup()
{
DDRC = 0b11111111; //все аналоговые порты в качестве выхода
// инициализация таймера 1
noInterrupts(); // отключить прерывания
TCCR1A = 0;
TCCR1B = 0;
TCNT1 = 0;
OCR1A = 200; // Установить соответствия регистра (16MHz / 200 = 80kHz Rechteck -> 40kHz Vollwelle )
TCCR1B |= (1 << WGM12);
TCCR1B |= (1 << CS10);
TIMSK1 |= (1 << OCIE1A);
interrupts();
}
ISR(TIMER1_COMPA_vect)
{
PORTC = TP;
TP = ~TP;
}
void loop()
}