В лаборатории JSK Токийского университета уже несколько лет работают над созданием гуманоидных роботов, имитирующих особенности человеческого тела. Недавно JSK представила нового робота Kengoro, который точно копирует наш опорно-двигательный аппарат и мускулатуру. Поклонники “Терминатора” уже нарекли его предтечей T-800, но сами разработчики планируют использовать его исключительно в мирных целях. Например, такой робот может стать отличным помощником инструктора по фитнесу. Он реалистично показывает эффект от тренировок разных групп мышц и даже потеет.
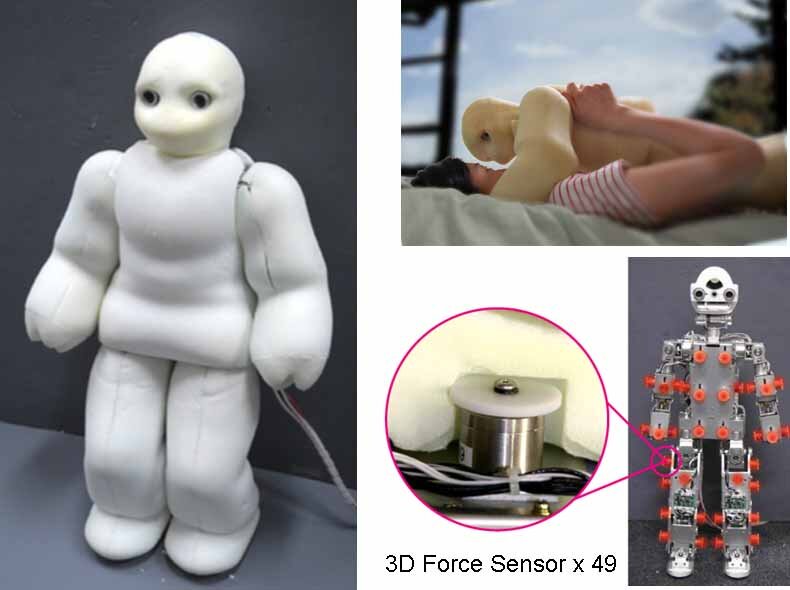
Ранее в JSK Lab (Jouhou System Kougaku Laboratory) были созданы роботы Macra (похожий на младенца) и робот Kenshiro (имитирующий подростка). Макра обладает высокой тактильной чувствительностью при небольшом количестве датчиков – их всего 49. Они фиксируют не только силу нажатий, но и их векторы, поэтому получили название “3D Force”. Эти сенсоры расположены под общим гибким слоем, имитирующим мягкие ткани. Контроллер обрабатывает данные от всех датчиков одновременно и с помощью математических алгоритмов детализирует информацию о прикосновениях.
Кенширо имитирует тринадцатилетнего мальчика ростом 158 см. и массой 50 кг. В нём специалисты JSK Lab начали воплощать отдельные анатомические и физиологические особенности человека. Если другие гуманоидные роботы создавались на основе теорий механики, то при проектировании Кенширо использовали методы биомимикрии. Он копирует скелетно-мышечную структуру и разветвления нервной системы, наглядно демонстрируя их взаимосвязь и поведение в различных ситуациях.
Скелетная структура Kenshiro в основном изготовлена из алюминиевого сплава A5052. Суставные поверхности и другие части сложной формы выполнены методом 3D-печати из ABS пластика и нержавеющей стали марки 420 SS. Упругие рёбра изготовлены отливкой из другого алюминиевого сплава – JIS-AC4C.
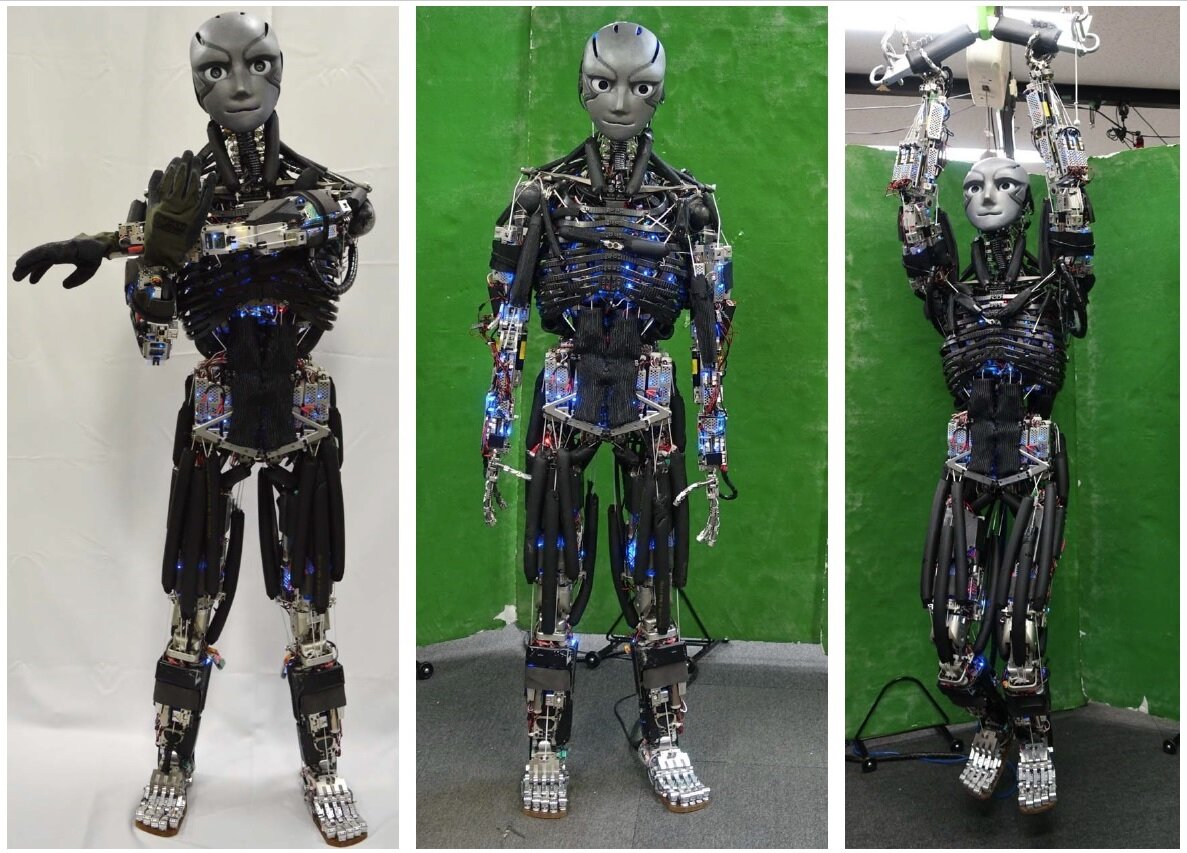
Новый Kengoro – ещё более продвинутая модель. Его скелетная структура состоит из комбинации особо прочного дюралюминия (A7075) и пластика ABS, армированного углеродным волокном. Некоторые фрагменты также выполнены методом 3D-печати. Встраиваемые в трубчатые “кости” Li-Fe аккумуляторы обеспечивают его автономную работу до 20 минут.
Кенгоро настолько реалистичен, что даже “потеет” во время тренировок. Как и люди, робот делает это, чтобы избежать перегрева. В искусственных мышцах Кенгоро циркулирует охлаждающая жидкость. Разработчики протестировали разные составы и остановились на обычной деионизированной воде. У неё рекордная теплоёмкость, низкая себестоимость и она безопасна для электроники, поскольку не проводит электрический ток.
Во время работы капли полностью обессоленной воды выдавливаются наружу через миниатюрные отверстия, изготовленные лазером во всех участках корпуса. Она быстро испаряется и понижает его температуру. Получается саморегулирующаяся система: чем интенсивнее работает искусственная мыщца, тем быстрее она охлаждается.
Постоянное испарение жидкости не так эффективно, как её циркуляция в закрытом охлаждающем контуре. Её приходится подливать примерно по одному-двум стаканам в час. Однако пористая структура и отказ от массивных радиаторов позволили сделать робота легче. Производительности “потеющей” системы охлаждения достаточно, чтобы Kengoro выполнял интенсивные нагрузки и успевал демонстрировать разные упражнения. Например, он может отжиматься в упоре лёжа 11 минут без остановки… а сколько сможете вы?
Успехи JSK Lab показывают, что сейчас в робототехнике прослеживается новое разделение. Среди гуманоидных роботов можно встретить представителей двух основных типов: с осевым управлением и с использованием искусственных сухожилий. Первая группа имеет исполнительные механизмы в каждом суставе и обладает небольшим числом степеней свободы –до 35. Наиболее известными представителями этой группы являются роботы Honda ASIMO и HPR-2 Promet.
Вторая группа представлена более современными и гибкими роботами. В них частично имитируются анатомические особенности суставов человека, но большая гибкость достигается в ущерб их мощности и прочности.
Даже таким роботам ещё очень далеко до человека: за счёт гибкого позвоночника и особенностей суставных поверхностей у нас гораздо большая подвижность. Западные врачи спортивной медицины обычно называют 220 – 260 степеней, а их японские коллеги и вовсе выделяют 548 степеней свободы (или 419, если не считать голову и руки).
Манипуляторы с мелкой моторикой всегда были наиболее сложной частью. В Кенширо удалось реализовать 64 степени свободы, а в Кенгоро – 174 (из них 60 приходятся на руки). Важно и то, что при создании Кенгоро разработчики смогли обеспечить баланс между пластичностью его движений и силой искусственных мышц. Кенгоро способен висеть на одной руке, выполнять подъём на носки стоя и держать равновесие практически в любой позе.
Если большинство гуманоидных роботов лишь отдалённо напоминают очертаниями человека, то Кенширо и Кенгоро выполнены со строгим соблюдением пропорций. Их отклонение от параметров среднего японца не превышает одного процента по длине любого участка тела и шестнадцати процентов по общей массе. Фактически эти роботы больше похожи на людей, чем многие из нас.
Основные области применения новых роботов – интерактивные занятия фитнесом, разработка спортивного снаряжения, изучение биомеханики, выполнение трюков и продвинутых краш-тестов. Существующие манекены позволяют оценить только пассивную безопасность автомобилей. Они всегда остаются неподвижны до момента удара. “Миметические гуманоиды”, как их называют сами разработчики, способны имитировать поведение водителя и пассажиров в момент аварии.
Источник: http://robotics.sciencemag.org/content/2/13/eaaq0899
Автор статьи: Андрей Васильков
Изображения взяты с: jsk.t.u-tokyo.ac.jp, JSK Lab.
Привет, это редакция канала the Robot. Если тебе понравилась эта статья или тематика нашего канала – нажми лайк и подпишись, чтобы не пропустить новые материалы.
Новости о роботах и ИИ теперь можно читать там, где тебе удобно, присоединяйся! Наш telegram канал : https://t.me/robotics_channel
Наш сайт: https://the-robot.ru/
E-mail расслыка лучших статей раз в неделю