Группа исследователей на базе Корнельского университета, продемонстрировала распадающегося модульного робота, состоящего из мелких ботов, которые могут совместно передвигаться, как единое целое, но затем распадаются и вновь соединяются в другой конфигурации, которая лучше подходит для решения поставленной задачи или для навигации с преодолением препятствий.
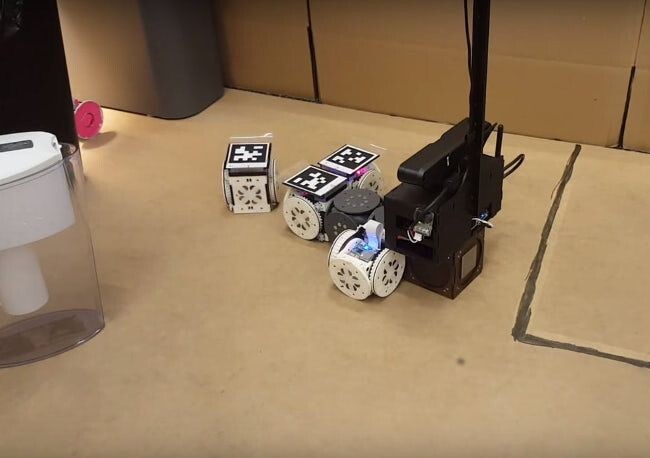
На самом деле этот модульный робот, разработанный в Университете Пенсильвании, состоит из нескольких роботов кубической формы с колесами с четырех сторон. С помощью магнитов они присоединяются друг к другу и к центральному блоку, имеющему камеры и компьютер для обработки поступающих данных.
Каждый робот общается с центральным блоком через Wi-Fi. Компьютер блока запускает программное обеспечение, которое включает в себя алгоритмы восприятия для отображения и навигации, и «планировщик высокого уровня для направления действий и реконфигурации», помогающий модульному коллективу роботов автономно перемещаться и выполнять задачи.
Исследователи уже имеют базу данных из 57 возможных конфигураций роботов, созданных на основе студенческих идей и конкурсных результатов. Среди этих конфигураций можно выделить Proboscis (с расширяемой рукой для захвата), Scorpion (где кубические роботы расположены в Т-образной форме) и Snake (со всеми модулями, расположенными в одну линию). Библиотека системы включает 97 алгоритмов поведения, в том числе подбирание или отбрасывание вещей, движение вверх до определенной точки и движение вперед или назад.
При активации модульный робот анализирует эти конфигурации и алгоритмы поведения, чтобы сформировать план действий для выполнения поставленной задачи.
Роботизированная система поучаствовала в разных экспериментах. Сначала перед модульным роботом была поставлена задача найти, извлечь и доставить все розовые и зеленые объекты в область, отмеченную синим квадратом. После изучения пространства и нахождения объекта установка приняла конфигурацию хоботка (Proboscis), захватила объект из узкого пространства, а затем снова изменила форму, чтобы перенести его в назначенную область сбора.
Еще одна задача заключалась в том, что модульный робот должен был положить печатную плату в почтовой ящик. Задание осложнялось наличием ступеней, по которым нужно было добраться до ящика. Робот предпринял много попыток, чтобы решить эту задачу, менял конфигурации и алгоритм действия, но в итоге успешно выполнил задание.
Понравился пост? Ставьте лайк и подписывайтесь на наш канал, чтобы следить за технологиями будущего!