Сам себе пылеробосос.
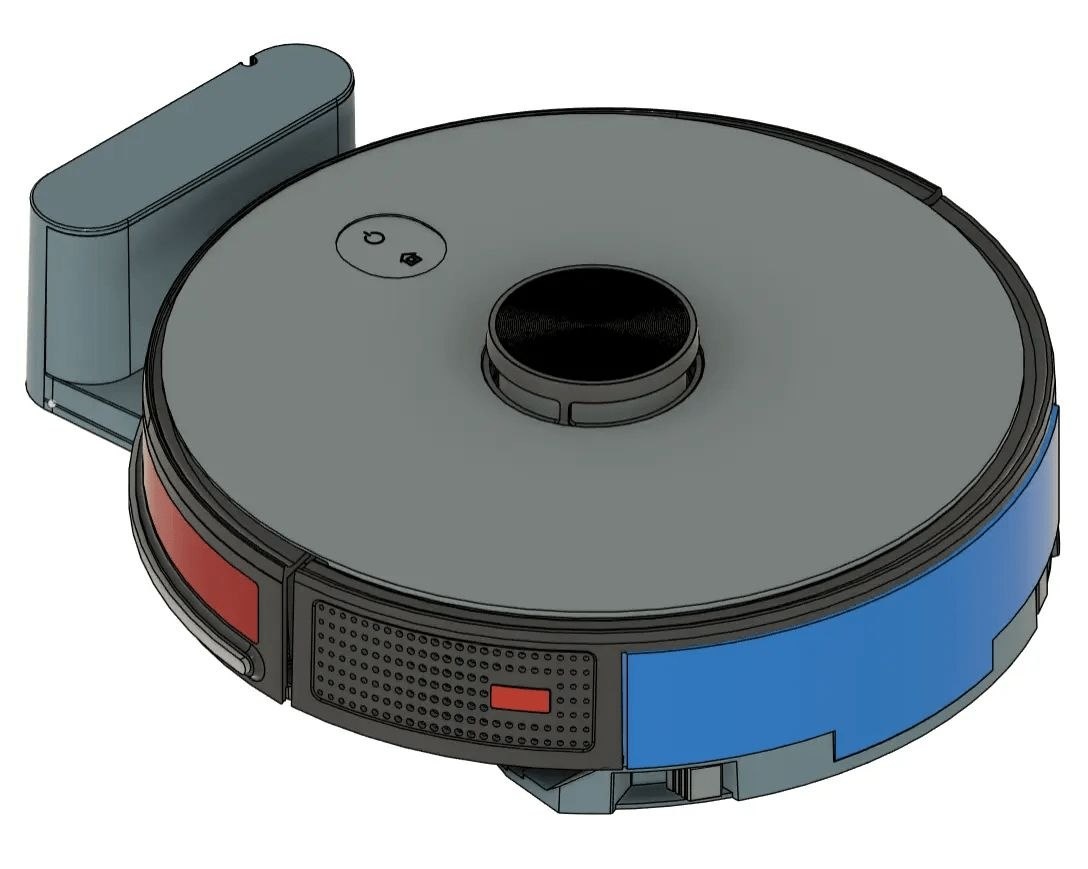
Энтузиаст запустил проект oomwoo — open-source робот-пылесос, который можно собрать самостоятельно. Устройство работает на Raspberry Pi и ROS 2, использует 2D LiDAR для навигации и интегрируется с Home Assistant. Главная особенность — полная локальность: никаких облачных сервисов и привязки к вендору.
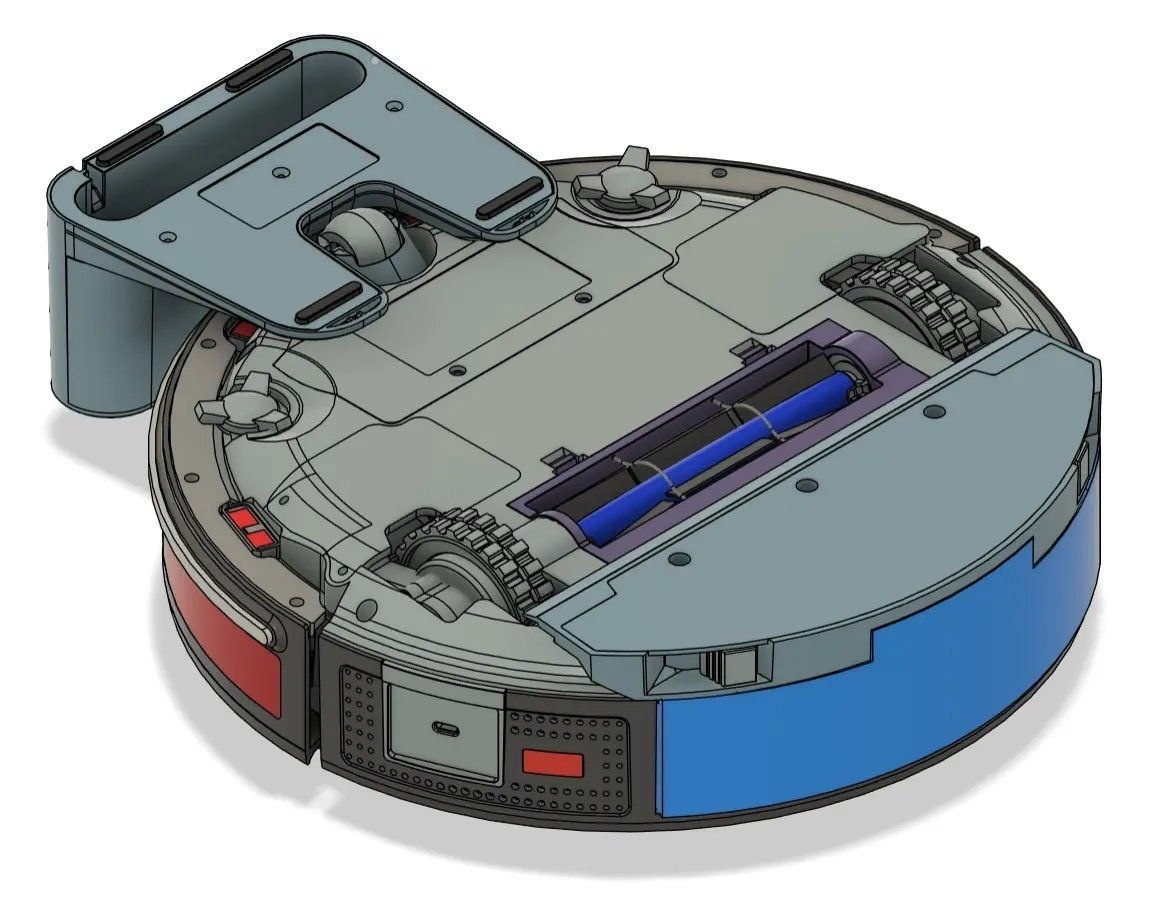
Корпус печатается на 3D-принтере, а вся документация открыта с первого коммита. Проект находится на ранней стадии, но уже готовы модули для симуляции в Gazebo, разработки системы навигации SLAM и даже конструкции контейнера для пыли. Авторы приглашают сообщество к параллельной разработке: любой может выбрать модуль по душе и предложить свои улучшения через pull request.
Исходный код, 3D-модели и схемы уже доступны на GitHub.