Горячие моторы — один из самых частых и тревожных симптомов на FPV-дроне. Тёплый колокол после агрессивного полёта — это норма, но если двигатель раскаляется так, что к нему невозможно прикоснуться, значит, с квадрокоптером что-то не в порядке. Перегрев почти всегда сопровождается мелкой вибрацией, «трелями» в звуке моторов и потерей эффективности, а в худшем случае заканчивается сгоревшей обмоткой прямо в воздухе. В этой статье разберём, почему греются моторы для дрона, и пройдём весь путь диагностики — от пропеллеров до настроек прошивки Betaflight.

Чем опасен перегрев моторов
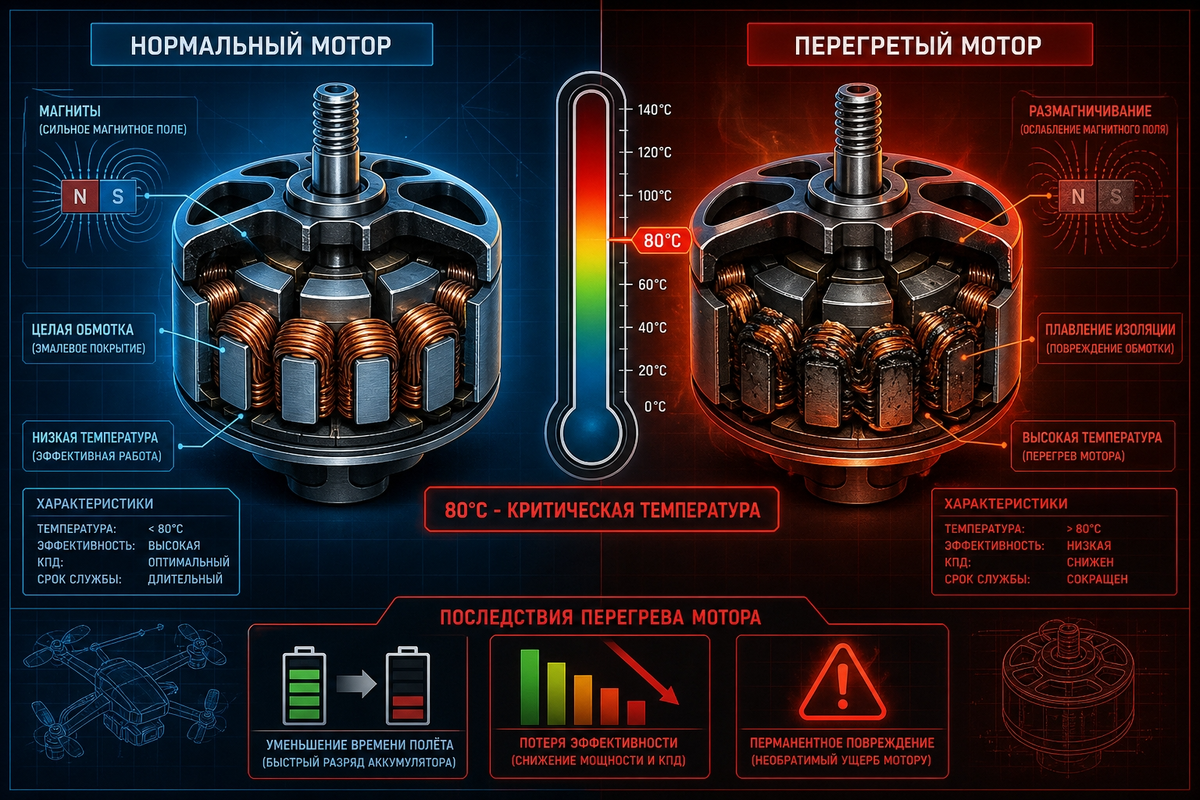
Главная проблема в том, что тепло — это потерянная энергия. Когда электрическая энергия не превращается в механическое вращение, она рассеивается в виде тепла, и последствия накапливаются. Горячие магниты постепенно размагничиваются, теряя мощность и эффективность мотора. Эмалевое покрытие на обмотках при перегреве плавится, что вызывает внутреннее короткое замыкание и необратимо убивает двигатель. Полетное время сокращается, потому что часть заряда уходит впустую — «в нагрев».
Простой тест на месте: после полета зажмите колокол мотора пальцами. Если удержать пальцы дольше нескольких секунд некомфортно — моторы слишком горячие, и пора искать причину. Критичной для изоляции проводов считается температура выше 80 °C.
Физика проблемы: откуда берётся жар
Полетный контроллер постоянно корректирует обороты моторов, чтобы стабилизировать дрон. В идеале эти корректировки плавные и укладываются в то, что мотор физически способен отработать. Но у двигателя есть масса и инерция — он не может мгновенно разогнаться или затормозить. Когда контроллер шлет команды, меняющиеся быстрее, чем мотор успевает реагировать, двигатель начинает «бороться сам с собой»: ток гоняется туда-сюда по обмоткам, энергия рассеивается в тепло вместо движения, температура растёт. Внешне мотор крутится нормально, но внутри он испытывает колоссальную нагрузку.
Откуда берутся эти слишком быстрые команды? Чаще всего — из шума. Гироскоп (MEMS-датчик на полётном контроллере) находится в крайне «шумной» среде: четыре мотора крутят пропеллеры на высоких оборотах, рама вибрирует, аппарат летит сквозь турбулентный воздух. Этот шум попадает в контур PID, и здесь вступает в дело главный виновник — D-term.
Главный подозреваемый: D-term и недостаток фильтрации
D-term (дифференциальная составляющая PID-регулятора) необходим для плавного полёта — он гасит перерегулирование и борется с propwash, то есть с вибрацией в собственном турбулентном потоке на выходе из маневров. Но математически производная многократно усиливает высокочастотный шум в сигнале. Если в контур попадает зашумленная телеметрия гироскопа, D-term раздувает её и отправляет на моторы быстрые колебания, которые двигатель физически не в состоянии отработать. Возникает положительная обратная связь, и результат один — тепло.
Отсюда два классических «софтовых» корня проблемы: слишком высокий D-gain и/или слишком слабая фильтрация. Именно поэтому в Betaflight фильтрация настроена консервативно — прошивка обслуживает сотни тысяч разных сборок и подстраховывается с запасом. Общий принцип настройки такой: сначала корректно настроить фильтры (чтобы убрать шум до того, как он попадёт в расчёт D-term, но не добавить лишней задержки), затем держать D-фильтрацию достаточной, и только потом поднимать PID до момента, когда начинается шум. Если вы не уверены в своих силах — оставайтесь на дефолте Betaflight, который на 5-дюймовых и меньших аппаратах в норме не должен давать ни осцилляций, ни горячих моторов.
Пошаговый чек-лист диагностики: от винтов до софта
Главное правило: меняйте по одному параметру за раз и проверяйте результат коротким тестовым полетом по одному и тому же маршруту на одинаковом газе. Хорошая отправная точка — 30–60 секунд на 50–70 % газа, затем садитесь и щупайте моторы.
- Пропеллеры. Самое первое и самое дешёвое действие — поставить новые винты. Погнутая или треснувшая лопасть бывает незаметна на глаз, но создает дисбаланс и вибрацию. Убедитесь, что не используете слишком большие винты или винты со слишком большим шагом — это перегружает мотор, который тщетно пытается выйти на заданные обороты. Если раньше определённый тип винтов летал нормально, начните с него. По возможности балансируйте пропеллеры — это снижает вибрацию, продлевает жизнь моторам и подшипникам.
- Механика и крепёж. Проверьте, всё ли надёжно затянуто: рама, камера, стек полетного контроллера. При этом не перетягивайте гайки стека — оставьте небольшой зазор, чтобы мягкое крепление (soft-mount) работало. Убедитесь, что нет болтающихся проводов, способных бить по FC или гироскопу в полёте; зафиксируйте всё стяжками. Дребезжащий провод — частый источник «необъяснимой» вибрации.
- Винты крепления моторов. Очень распространенная ошибка — слишком длинные винты, упирающиеся в обмотку мотора. Поскольку карбон проводит ток, это вызывает короткое замыкание, перегрев отдельных моторов, десинхронизацию, помехи в видео и в итоге сгоревший двигатель. Проверка мультиметром в режиме прозвонки: один щуп на винт мотора, второй — на любой из трёх проводов мотора (все три соединены внутри). Если есть контакт — винт касается обмотки. Правило длины: винт примерно на 2 мм длиннее толщины луча (для 5-мм лучей — 7-мм винты, для 3-мм — 5-мм). При нехватке коротких винтов используйте шайбы.
- Проверка самих моторов. Снимите все винты, подключите батарею и во вкладке Motors в Betaflight Configurator покрутите каждый мотор по очереди, наблюдая за трассами гироскопа — так видно, какой мотор шумит и вибрирует сильнее остальных. Прокрутите каждый мотор и рукой. Возможен один неисправный двигатель, и признаков несколько: изношенный или поврежденный подшипник даёт характерный визг или скрежет, погнутый вал заставляет колокол и магниты задевать за статор, а разбалансированный колокол создает вибрацию на оборотах. Скрежещущий или хрустящий звук, щелчки и постукивания — это симптомы убитого подшипника, и фильтрами они не лечатся. Подшипники можно заменить, но если повреждены обмотки статора или сильно погнут вал, надёжнее поставить новый бесколлекторный двигатель — летать на «отремонтированном» моторе рискованно.
- Электроника и помехи. Если на силовых площадках ESC ещё нет конденсатора — припаяйте его обязательно. Если конденсатор уже стоит, попробуйте больший по емкости или добавьте ещё один: low-ESR конденсатор сглаживает электрический шум, попадающий на гироскоп. Конденсаторов «слишком много» не бывает — лишь бы хватало места.
- Настройки ESC. Переключение частоты PWM на ESC на 48 кГц немного снижает силу торможения, но заставляет моторы крутиться плавнее и снижает их нагрев.
- Откат к дефолтному тюну — ключевая развилка. Верните стоковые PID и фильтры Betaflight и снова проверьте моторы. Это самый быстрый способ разделить софт и железо. Если на дефолте моторы остаются холодными — проблема была в вашем тюне, и его надо подкручивать аккуратно, по одному параметру. Если же даже на дефолтных настройках моторы греются — это сильный сигнал, что причина механическая или электрическая (плохая сборка, неисправный компонент), и копаться в софте бесполезно.
Настройка фильтров в Betaflight: как «остудить» моторы
Поскольку D-term усиливает шум сильнее всего, лечение перегрева начинают именно с D-term фильтрации. Краткая теория: фильтры низких частот (Low Pass Filter, LPF) пропускают низкие частоты и подавляют высокие. Полезная информация о движении дрона лежит в диапазоне 0–80 Гц (до ~80 Гц — это propwash), а всё, что выше, — преимущественно шум. Важнейший принцип: чем ниже частота среза (cutoff), тем сильнее фильтрация. Распространённая ошибка — увидев шум на 200 Гц, ставить срез ровно на 200 Гц; это почти ничего не даёт, срез надо опускать заметно ниже пика шума. Но сильная фильтрация добавляет задержку (latency), а задержка делает контур PID менее эффективным, поэтому всегда ищется баланс между подавлением шума и задержкой.
Практический рецепт против горячих моторов выглядит так. Понижайте срез D-term low pass фильтра шагами по 20 Гц, не опускаясь ниже 80 Гц. Если у вас два D-term фильтра, доведите один примерно до 100 Гц, и при сохранении перегрева начинайте опускать второй — тоже шагами по 20 Гц. Если один из D-term фильтров стоит как PT1, можно переключить его на Biquad: этот тип режет круче и усиливает фильтрацию, хотя добавляет немного задержки (PT1 мягче и быстрее). Минимально разумная фильтрация D-term — это Biquad в районе 100–80 Гц. После каждого изменения делайте короткий тест в висе и щупайте моторы.
Если перегрев сопровождается осцилляциями (колебание звука по тону, мелкая тряска), но они остаются и на дефолтном тюне — причина в механике или электрике. В этом случае пробуют немного усилить и фильтрацию гироскопа: понижают один gyro low pass шагами по 20 Гц (опять же стоп на 80 Гц), затем при необходимости опускают нижний D-term фильтр. Отдельно держите включенным динамический notch-фильтр (Dynamic Notch) — он автоматически отслеживает пик моторного шума по FFT-анализу и эффективно вырезает его с меньшей задержкой, чем LPF; он же хорошо ловит шум от погнутых винтов и изнашивающихся моторов. Ещё мощнее работает RPM Filter — набор notch-фильтров, нацеленных на обороты моторов и их гармоники; он позволяет убрать часть штатной фильтрации и снизить задержку.
Настройка через слайдеры PID Tuning
В современных версиях Betaflight вкладка PID Tuning по умолчанию управляется упрощёнными слайдерами (режимы OFF / RP / RPY). Несколько слайдеров напрямую связаны с нагревом моторов, и официальная документация прямо предупреждает об этом.
Слайдер Damping (D Gains) — относительно высокий D гасит осцилляции и улучшает propwash, но может делать моторы горячими. Если двигатели перегреваются, это первый кандидат на снижение. Tracking (P & I Gains) повышает отзывчивость аппарата, но избыток вызывает трели, осцилляции и горячие моторы. Master Multiplier поднимает все PID сразу — его трогают только когда исчерпаны другие слайдеры, и избыток снова даёт «трели» и перегрев. Dynamic Damping (D Max) задает максимум, до которого В «подстраивается» в быстрых движениях; при сдвиге вправо документация советует проверять нагрев моторов и слушать странные звуки.
Полезный соседний инструмент — Motor Output Limit в разделе Throttle and Motor Settings. Он процентно ограничивает сигнал на мотор и снижает ток и нагрев при использовании батарей с большим числом банок на высоко-KV моторах. Например, при 6S на сборке под 4S попробуйте 66 %, а при 4S на сборке под 3S — 75 %. Это особенно актуально, если вы перешли на более высокое напряжение, не сменив сами двигатели.
Общая логика работы со слайдерами при перегреве: сначала сдвиньте влево Damping и при необходимости Tracking или Master, проверьте полётом, и только убедившись, что моторы остаются холодными на консервативных значениях, аккуратно наращивайте обратно.
Инструменты, которые понадобятся
Для механической части пригодятся набор шестигранников (имбусов) под винты моторов и рамы, а также ключи или головки для гаек стека — с аккуратной затяжкой, не пережимая soft-mount. Для проверки моторных винтов на короткое замыкание нужен мультиметр с режимом прозвонки (continuity). Для серьёзной диагностики софта используют Blackbox-логгер и анализатор логов (например, PIDtoolbox), которые визуализируют шум гироскопа и D-term до и после фильтрации и позволяют точно сравнить эффект слайдеров. Балансировщик пропеллеров поможет убрать дисбаланс винтов.
Когда дело не в настройках, а в железе
Если вы прошли весь чек-лист, вернулись к дефолтному тюну, а моторы всё равно раскаляются — проблема почти наверняка механическая. Чаще всего виноваты убитый подшипник, погнутый вал, разбалансированный колокол или закоротивший на обмотку винт. Подшипники в большинстве случаев меняются, но мотор с поврежденной обмоткой или сильно деформированным валом восстановлению фактически не подлежит и его проще заменить.
В каталоге ДронексТех можно подобрать замену под конкретную задачу: основной раздел двигателей для дронов с моделями разного KV под сборки от 2S до 8S, отдельная категория бесщёточных двигателей для FPV-сборок 5–10 дюймов, а также сервоприводы для рулевых поверхностей самолётных платформ. Важное правило при замене: все четыре мотора на квадрокоптере должны быть идентичны по размеру статора, KV и производителю — разные двигатели создают дисбаланс тяги, вибрации и нестабильность, которую не вытянет даже идеальная настройка полетного контроллера.
Заключение
Хорошо настроенный дрон летает плавно и эффективно, а после посадки его моторы холодные или лишь чуть тёплые. Перегрев — это всегда сигнал, что энергия теряется в тепло, а причина может быть как в железе, так и в софте. Поэтому диагностика идёт строго по чек-листу: новые винты, затем крепеж и провода, длина винтов моторов, проверка двигателей во вкладке Motors, конденсаторы и настройки ESC и, наконец, откат к дефолту. Если дефолтный тюн оставляет моторы холодными, проблема была в настройках, и фильтрацию с PID правят аккуратно, по одному шагу. Если же даже на дефолте моторы раскаляются — ищите механику и при необходимости меняйте неисправный двигатель.