
Мы продолжаем рассказывать об опыте работы со SLAM‑сканером LiGrip O2 от Green Valley. Первую статью на эту тему можно почитать здесь.
Поскольку покупка пришлась на зимний период, все первичные тесты и сравнения мы начали с внутренних помещений. И, конечно же, с чем ещё сравнивать, как не с проверенным временем и надёжным помощником — Trimble X7?
Сразу скажу: для большинства специалистов изначально понятно, что сравнивать эти устройства нужно осознанно. Несмотря на то, что и там, и там используется лазерное сканирование, точностные характеристики у них на старте разные. Технология работ тоже отличается — у каждой есть свои плюсы и минусы. Поэтому в нашем исследовании мы взяли НЛС за эталон и хотели в первую очередь понять реальные возможности использования SLAM‑сканера. Все приведённые значения и характеристики — не рекламные, а естественные, полученные в ходе испытаний, без фильтров и прикрас, как есть.
Первый пример — часть помещений нашего офиса.
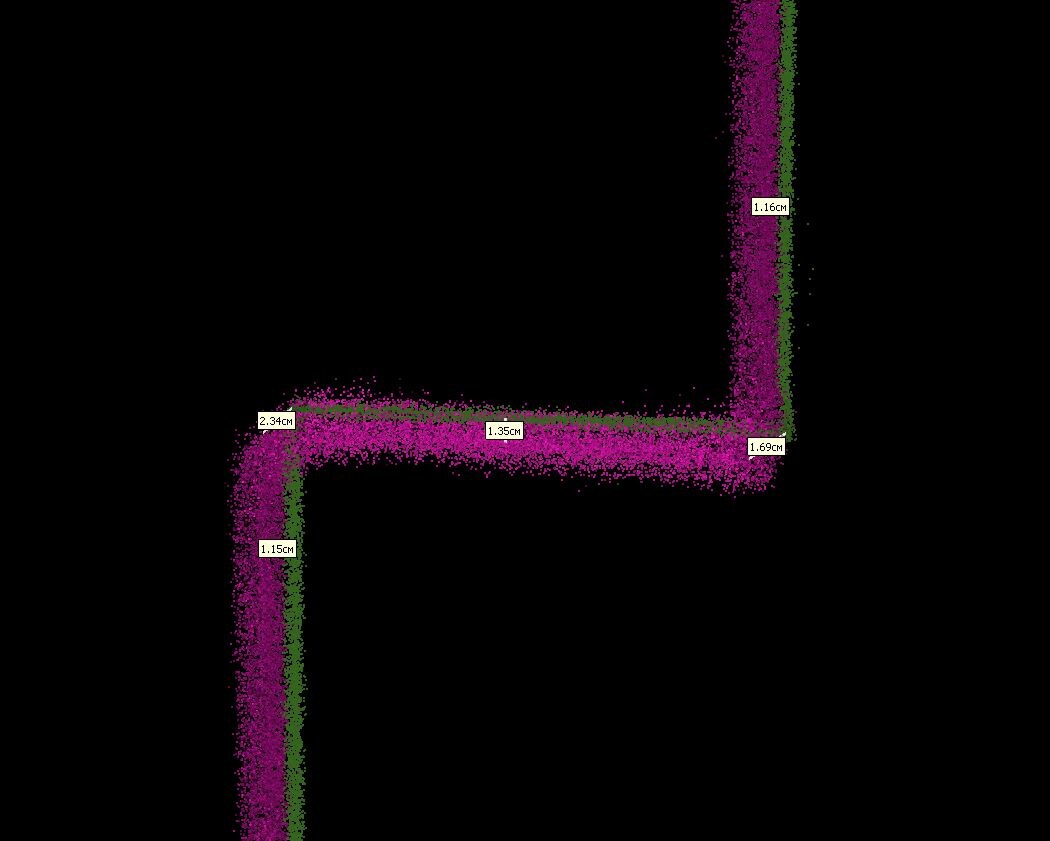
Невооружённым взглядом видна разница в толщине «пирога» двух облаков точек. Если говорить точнее — так, как любит и привыкли большинство геодезистов, — в цифрах: на данном примере у X7 это порядка 1 см, у O2 — порядка 2,5 см.
Вторая характерная черта абсолютного большинства SLAM‑сканеров — скруглённые углы. Здесь мы специально выделили участок стены с двумя углами, чтобы наглядно показать результат. Общее сопоставление всех помещений представлено в выводах в конце данной статьи.
Вторым объектом сравнения стал уже реальный наш объект — станция водоочистки на очистных сооружениях. Ранее мы проводили сканирование этого объекта с помощью НЛС с последующим моделированием в Revit. Здесь уже был практический опыт и непосредственная область интереса: сможет ли SLAM‑сканер помогать нам в таких проектах и ускорять работу?
Объект идеально подошёл для тестов: он насыщен инженерными коммуникациями, разноуровневый — в общем, самое место для проверки возможностей сканера. Пример визуализации объекта мы показали на результате пока ещё новой для нас технологии DGS (Gaussian splatting), полученной со SLAM‑сканера LiGrip O2. Это интересная технология, она позволяет быстро и наглядно визуализировать пространство, но пока в полной мере оценить возможность её последующего практического применения нам ещё предстоит разобраться.
А вот как это выглядит на обычных фото:
Съемку выполнили в полном объеме Trimble X7 и следом LiGrip O2:
Перейдём сразу к итогам сравнения.
Безусловно, скорость сканирования SLAM‑сканером оказалась выше и проще. Но если смотреть объективно, то на весь объём работ трудозатраты уложились в один рабочий день в обоих случаях. При этом:
- со SLAM‑сканером мы справились за пару часов;
- с Trimble X7 потребовалось потратить полную рабочую смену.
Если говорить про качество материалов и точностные характеристики, то можно отметить следующее: в целом по основному конструктиву помещений результаты удовлетворительные. То есть для общих обмерных работ SLAM‑сканер можно смело использовать. И даже в таких узких и длинных однотипных проходах проблем с регистрацией облака в режиме SLAM‑сканирования не возникло.
Но это подходит только для общих задач, а не для ключевых объектов моделирования. Сегодня использовать для этих задач первый попавшийся SLAM‑сканер будет ошибкой. Даже в нашем случае использовалась не базовая версия, а максимальная (32‑канальный, точек/сек), и всё равно ключевые объекты моделирования не позволяют сходу получить надёжный результат.
Особенно это заметно на трубопроводах: их в производственном помещении достаточно много, и их необходимо детально смоделировать для последующей замены одного оборудования на другое в те же места.
Теоретически, конечно, можно добавить много опознаков и контрольных точек — по ним можно качественнее произвести регистрацию облака и выполнить прочие манипуляции, повышающие конечный результат. Но тогда, на мой взгляд, теряется весь смысл: по скорости всё и так укладывается в один рабочий день, а если ещё дополнительно использовать тахеометр, то это уже явно не упрощает процесс, а значительно его усложняет.
Вывод
SLAM‑сканер сегодня можно уверенно использовать для общих обмерных работ, техпланов, поэтажной съёмки и прочих вариантов работ, требующих сантиметровой точности. Это позволит значительно оптимизировать трудозатраты на полевом этапе и в большинстве случаев — на камеральном тоже. Итоговый результат для таких работ вполне сопоставим с традиционными материалами НЛС.
На рисунке ниже мы привели пример сопоставления той самой части нашего офиса, о которой писали в начале статьи, с указанием средней величины отклонений между облаками и площади помещений. Это поможет наглядно понять, о каких значениях идёт речь (зелёным цветом — НЛС, фиолетовым — SLAM).
Но когда стоит задача выполнения работ для последующего моделирования, особенно с детализацией LOD250/300 и более, использовать SLAM в чистом виде я бы точно не стал на сегодняшний день.
Уверен, что спустя совсем небольшое время технологии существенно усовершенствуются, математические алгоритмы обработки данных доработаются, и мы перейдём на следующую ступень развития и использования оборудования.
Автор статьи: Устинов Артём Юрьевич - главный инженер.