Одной из актуальных задач нашего времени является повышение престижа российской науки в целях развития наукоемких направлений техники, которыми занимается ЦНИИ «Электроприбор». И в этой связи приятной новостью стал рост рейтинга англоязычной версии нашего журнала «Гироскопия и навигация» в авторитетной международной наукометрической базе Scopus. Рейтинг журнала поднялся до уровня Q2, что означает его переход в диапазон 25-50% лучших научных изданий мира по данной тематике.
Предлагаем вам познакомиться со свежим, первым в 2026 году номером журнала «Гироскопия и навигация». Постараемся как можно более доступным языком рассказать вам о работах, которые ведут сегодня учёные и инженеры. Речь пойдёт о навигации в самом широком смысле – от перемещения роботов до тончайших колебаний атомных часов, от ошибок навигационных систем до поиска подводных лодок в морской пучине.
Казалось бы, спутниковые системы вроде GPS или ГЛОНАСС созданы для того, чтобы определять наши координаты. Однако специалисты знают, что получить от них можно гораздо больше – например, данные о скорости движения и ускорении. Взяв за основу так называемые фазовые и доплеровские измерения – самые точные «сырые» данные, поступающие с навигационных спутников, и применив численное дифференцирование, авторы определили, с каким ускорением движется самолёт или иной объект. При этом обрабатываются сигналы обычного приёмника спутниковой навигации. Работа эта имеет важное значение для аэрогравиметрии – области научного знания, в рамках которого изучаются методы измерения гравитации Земли с воздуха. Эффективность предложенного авторами подхода показана на экспериментальных данных.
Следующая статья посвящена контролю параметров навигационной аппаратуры (автор – из АО «Концерн «ЦНИИ «Электроприбор»)
Навигационные приборы, как известно, не идеальны. Обычно их погрешности принято описывать классическими стационарными моделями, однако в реальности данные, полученные экспериментальным путем, в эти модели не укладываются. Тут-то и приходят на помощь расширенные модели, которые позволяют описать все виды отклонений от классических стационарных моделей. Автор делит расширенные модели на две группы. Первая – это когда на стационарный случайный процесс накладываются систематические сдвиги: тренды, скачки, периодические помехи. Ко второй относятся процессы со стационарными приращениями (например, знаменитый винеровский процесс), где обычная дисперсия неприменима, а главной характеристикой становится структурная функция и её оценка – вариация Аллана. Строгий математический анализ сочетается с практическими «рецептами»: как выявить и оценить систематические погрешности, как просуммировать их со случайными ошибками и принять верное решение о точности аппаратуры.
Статья о трехслойной системе управления TriLayer-Nav написана магистрантами Университета ИТМО при участии их научного руководителя – доцента факультета систем управления и робототехники.
Если вы хотите, чтобы робот на колёсах двигался плавно, не врезался в возникающие на его пути препятствия, а аккуратно обходил их и при этом экономил энергию, ему нужен «интеллект». В качестве такового авторы предложили использовать трехуровневую систему управления – TriLayer-Nav. Ее суть заключается в следующем. Сначала алгоритм А* прокладывает общий безопасный маршрут по известной заранее карте местности. Во процессе движения за дело принимается метод динамических окон в режиме реального времени, который позволяет обходить внезапные препятствия, выбирая нужную скорость.
Наконец, метод управления по прогнозирующим моделям работает непрерывно, поскольку его задача – корректировать при необходимости поступающие роботу команды. Эффективность системы проверялась путем моделирования: с ее помощью робот сумел пройти сложный лабиринт по кратчайшей траектории и не столкнуться с препятствиями в 96,6% случаев. Другие схемы показали гораздо более скромные результаты: 71–77% успешных проездов.
В спутниковой навигации точное знание времени критически важно. Но что, если бортовые часы спутника вдруг будут давать сбои либо просто начнут убегать или отставать? Тогда все пользователи получат ошибочные сведения о координатах, а в наш век автоматизации это может привести к большим проблемам.
На примере индийской региональной системы NavIC учёные разработали метод непрерывного контроля работы спутниковых часов в реальном времени с помощью измерения фазы несущей. Авторы построили простой и эффективный алгоритм, который позволяет выявить аномалии в работе часов – к ним относятся резко отклоняющиеся от средних значения (так называемые выбросы), скачки фазы и частоты. После того как аномалии обнаружены, параметры коррекции часов вновь оцениваются и затем обновляются. Метод не требует сложных математических моделей часов, легко реализуется на борту спутника и позволяет немедленно передавать пользователям уточнённые данные.
Статья аспиранта Южно-Уральского государственного университета посвящена обработке информации в визуально-инерциальных системах. Это такие системы навигации, в которых бесплатформенная инерциальная навигационная система на основе трех гироскопов и трех акселерометров объединена с системой технического зрения, в которой обрабатываются изображения, полученные с бортовой видеокамеры.
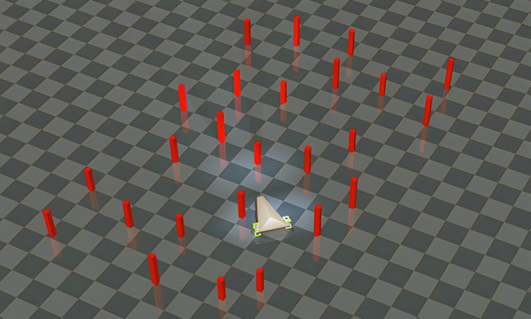
Современный робот или дрон может видеть сотни ориентиров одновременно и по ним уточнять свой путь. Пример изображения с отмеченными красными точками ориентирам приведен ниже.
Одновременно обработать такой объем информации – сложнейшая вычислительная задача. Автор статьи предложил использовать для этих целей быстрый блочный фильтр Калмана, который справляется с вычислениями с помощью математической декомпозиции и метода главных компонент. Это позволило снизить сложность вычислений. В результате время расчётов растёт лишь прямо пропорционально числу точек, а не в кубической пропорции, как происходит при использовании других методов. При этом точность остаётся практически на таком же уровне, что и у классического фильтра Калмана, и можно неограниченно долго отслеживать одни и те же детали ландшафта. Моделирование показало, что сотни визуальных ориентиров быстро обрабатываются в реальном времени на обычном компьютере.
Представьте себе длинную антенну, уложенную на дне моря для мониторинга подводной обстановки. У такой антенны имеются гидроакустические приемники, чье местоположение важно знать точно, чтобы адекватно оценить информацию, которую они предоставляют. Как этого добиться? Существует ряд методов для расчета координат приемников. Однако перед тем как ими воспользоваться, следует установить условия, позволяющие получить нужные результаты. Путем моделирования авторам удалось определить условия, при которых местоположение приемников вычисляется с точностью не менее 1 м.
Так, выяснилось, что при глубине 2000 м полоса движения судна-носителя должна быть порядка 2 км, при этом необходимо не менее тысячи измерений на каждый приёмник и очень точная спутниковая привязка излучателя. При измерении времени прихода сигнала ошибка не должна превышать 1 миллисекунды – только тогда положение приёмника будет определено с требуемой точностью.
В гидролокации, когда источник звука и приёмник разнесены, для определения координат нужно объекта обычно нужно знать ориентацию антенны в пространстве. Это не всегда простая задача, т.к. обычный компас неточен, особенно это проявляется в высоких широтах. Авторы предложили алгоритм, не требующий знания ориентации антенны. Необходимо определить только угол между прямым сигналом, пришедшим от излучателя, и эхом – отражённым от цели. Измеряется также разность во времени их прихода.
С этой целью используется гироскоп, который просто отслеживает поворот антенны за этот короткий промежуток времени. Дальше вступают в дело метод максимального правдоподобия и гипотеза о равномерном прямолинейном движении цели. Компьютерное моделирование подтвердило: курс, скорость и положение подводной цели вычисляются достаточно точно, а главное – совершенно автономно, без привлечения данных о сторонах света, что делает систему незаменимой в арктических широтах.
И напоследок – событие из мира науки.
В этом же номере журнала опубликована заметка о XXVIII конференции молодых учёных «Навигация и управление движением», состоявшейся в марте 2026 года в концерне ОСК «Электроприбор». Ей предшествовал лекционный день, в течение которого ведущие ученые рассказывали о современном состоянии гироскопии – от классических роторных гироскопов до новейших квантовых. Собралось около 300 юных исследователей со всей страны и из-за рубежа. Участники представили доклады, побывали на мастер-классе по системам ориентации, используемым на спутниках. Лучшие исследования были награждены премиями имени выдающихся учёных. За круглым столом «Наука и индустрия» развернулась оживлённая дискуссия: где легче построить карьеру, как удержать таланты и совместить свободный научный поиск с производственной рутиной? Вывод участников был единодушным: только вместе вузовская наука и промышленность способны двигать технический прогресс. И это отрадно для всех, кто верит в силу знаний и преемственности поколений.