Мысль дня: сборки 3D-модели нужно делать. Всегда. 😄
Так я говорю всем ученикам, но ровно в тот момент, когда сам не сделал, попал в ту же ловушку!
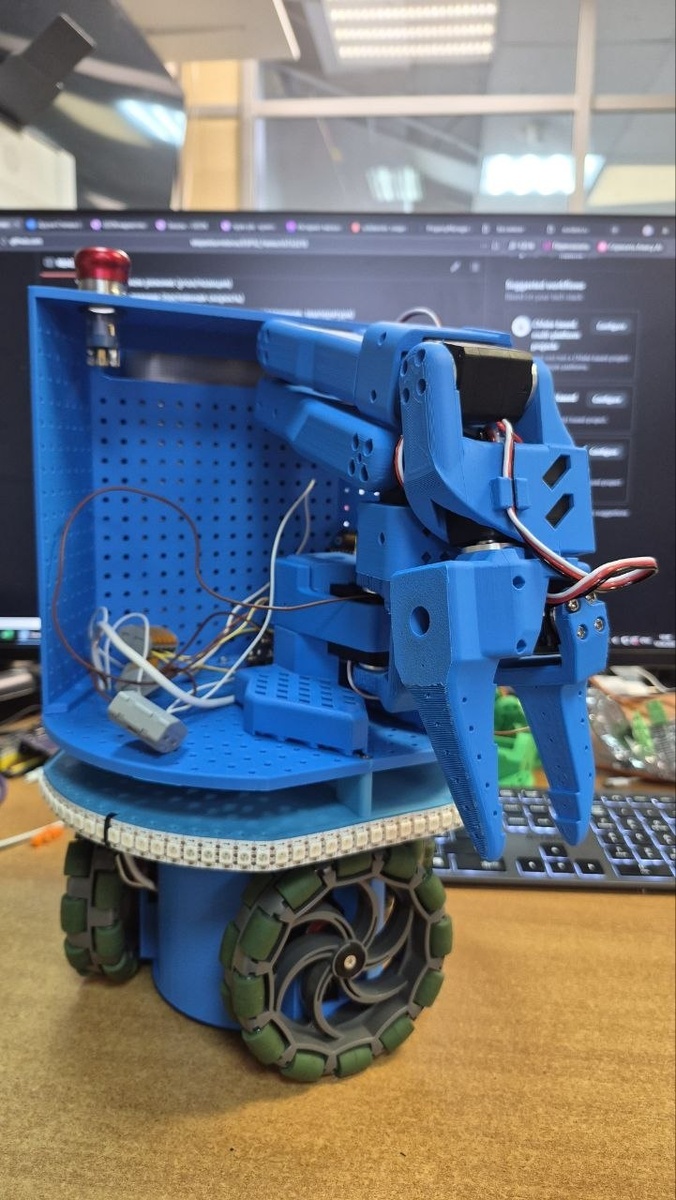
Манипулятор получился — напечатался, собрался, выглядит отлично…
НО 🤦♂️ в робота он просто не влез
Не проверил геометрию разворота — и в итоге на фото видно, как он упирается в верхнюю часть корпуса.
👉 Вывод простой и важный: проверка кинематики и габаритов — обязательный этап, а не “потом посмотрим”
Но ничего страшного — это нормальный инженерный процесс:
— поправим основание
— занизим конструкцию
— пересоберём
— и будет 🔥
Для интересующихся 👇
Манипулятор сделан на основе открытого проекта LeRobot:
https://huggingface.co/docs/lerobot/so101
Сервы: FeeTech STS3215
(кстати, в базе робота используются такие же — удобно унифицировать систему)
Под них я написал свою библиотеку:
— управление режимами
— работа с обратной связью
— удобный интерфейс для проектов
GitHub:
https://github.com/stepanburmistrov/ESP32_FeetechSTS3215
(Звездочку не забудьте поставить репозиторию😉)
Буду дорабатывать конструкцию — покажу, что получится дальше 👀