Что, если дрон мог бы «думать» как стрекоза — мгновенно, экономично и без тяжёлого графического процессора? Именно это реализовали исследователи Делфтского технического университета (TU Delft, Нидерланды).
Мозг против видеокарты: в чём разница
Обычный дрон обрабатывает изображение на GPU — графическом процессоре. Это мощная, но прожорливая микросхема: она берёт кадр целиком, прогоняет через миллиарды математических операций и выдаёт результат. Даже если в кадре за последние 100 миллисекунд почти ничего не изменилось — GPU всё равно пересчитывает всё заново. Это как перечитывать книгу с первой страницы каждый раз, когда нужно вспомнить одно слово — или листать годовой бухгалтерский отчёт ради одной цифры.
Нейроморфный процессор устроен иначе — по образцу живого мозга. Его вычислительные элементы («нейроны») молчат большую часть времени и активируются только тогда, когда что-то меняется. Нет изменений — нет вычислений, нет расхода энергии. Именно так работает нервная система насекомых: мозг стрекозы не сканирует и не просчитывает весь мир вокруг, а реагирует лишь на движение добычи или препятствия.
То же различие — между стандартной нейросетью и импульсной (Spiking Neural Network, SNN). Обычная нейросеть передаёт между слоями непрерывные числа и делает это постоянно. SNN передаёт короткие «импульсы» — как настоящие нейроны в мозге — и только при необходимости. Результат: в 10–64 раза меньше вычислений при той же задаче.
Что значит «работать по принципам мозга животных»? Вот три конкретных примера из природы:
- Муха уворачивается от мухобойки за 30 мс — её зрительная система реагирует не на картинку, а на расширение тёмного пятна в поле зрения. SNN копирует именно этот механизм
- Стрекоза отслеживает добычу на фоне хаотичного движения листьев — мозг выделяет «маленький движущийся объект» и игнорирует фон. Нейроморфная камера делает то же самое
- Голубь удерживает горизонт при порывах ветра без GPS и акселерометра — только по потоку оптических сигналов. Именно оптический поток лежит в основе системы зависания нейроморфного дрона TU Delft
Разработка TU Delft: от идеи к летающему прототипу
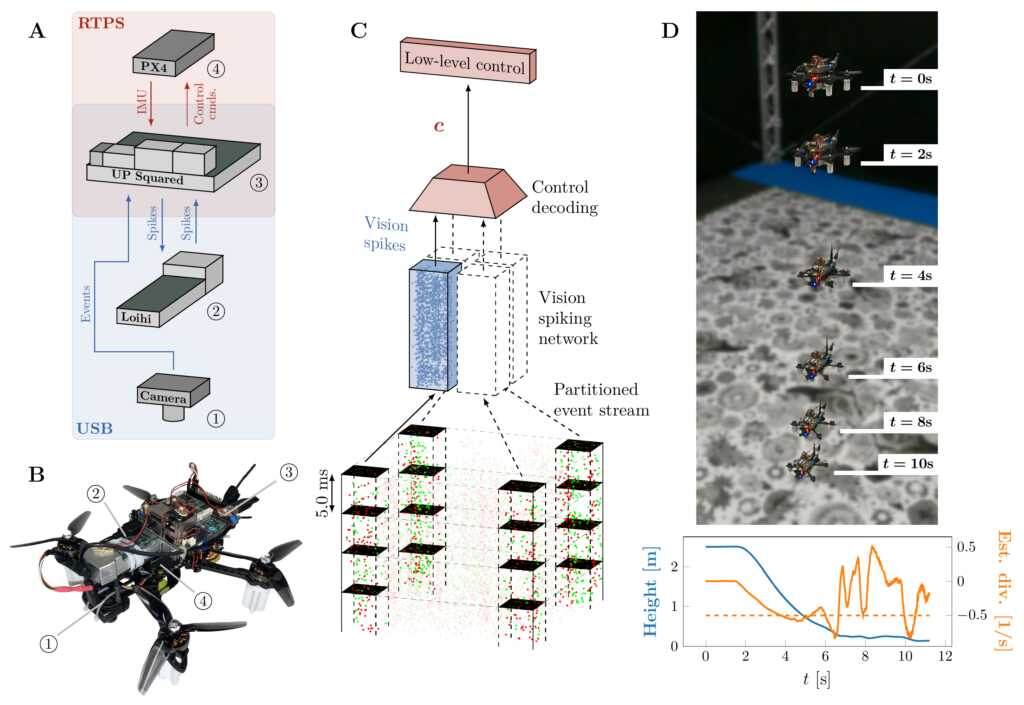
Команда учёных под руководством Федерико Паредес-Вальеса в 2024 году впервые создала полностью нейроморфный конвейер «зрение → управление» на борту летящего беспилотника, опубликовав результаты в журнале Science Robotics. Вместо обычной камеры — нейроморфная, которая не делает снимки, а фиксирует лишь изменения яркости пикселей. Вместо GPU (графического процессора) — нейроморфный чип Intel Loihi. Вместо стандартной нейросети — SNN из 28 800 нейронов в пяти слоях, работающая по принципам мозга животных.
Не сухой академизм, а полёт насекомого: быстро, точно, без права на паузу
Перед прототипом ставили три базовые задачи, которые любое летающее существо решает инстинктивно: зависнуть на месте, плавно приземлиться и сместиться боком, одновременно удерживая курс при рыскании. Всё это — без GPS и внешних систем позиционирования, только по собственному «зрению». Оценить поведение дрона в полёте можно в официальном видео от команды TU Delft.
Дрон решал поставленные задачи в четырёх разных световых сценариях: нормальное освещение, почти полная темнота, резкое мерцание ламп и хаотичный узорчатый фон — условия, при которых стандартная камера теряет ориентацию. Ключевым доказательством «животного» принципа работы стал оптический поток: дрон оценивал собственное движение так же, как птица или насекомое — по тому, как картинка «плывёт» относительно поверхности под ним, а не по абсолютным координатам. По словам Паредес-Вальеса, главной сложностью было не выстроить архитектуру решения, а обучить импульсную нейросеть так, чтобы она одинаково хорошо работала и в симуляторе, и на реальном аппарате.
Сегодня разработка находится на уровне TRL 4–5: это реально летающий лабораторный прототип, успешно прошедший испытания в реальных условиях, но ещё не готовый к коммерциализации. К декабрю 2025 года исследования продвинулись дальше: в докторской диссертации TU Delft представлена сквозная нейроморфная система управления на крошечном квадрокоптере Crazyflie весом 27 г — она читает данные с инерциального датчика и напрямую отдаёт команды двигателям с частотой 500 Гц, не уступая традиционным алгоритмам. Исходный код обучения нейросети опубликован на GitHub.
⚡ Ключевые результаты оригинального прототипа:
- Обработка данных в 10–64 раза быстрее, чем на GPU (графическом процессоре)
- Потребление энергии в 3 раза ниже
- Чип потребляет всего 0,94 Вт в ожидании и лишь 7–12 мВт во время работы сети
- Дрон зависает, выполняет посадку и маневрирует боком, даже при одновременном рыскании
- Работает при любом освещении — от темноты до яркого света и мерцания
Параллельные разработки и взгляд в будущее
В ноябре 2024 года на arXiv (открытый научный репозиторий Корнеллского университета, где публикуются препринты статей до официального рецензирования) опубликована работа о первой нейроморфной системе управления ориентацией для квадрокоптера Crazyflie: SNN напрямую конвертирует данные сенсоров в команды двигателям без промежуточных блоков. В январе 2025 года Intel запустила Hala Point — крупнейшую в мире нейроморфную систему с 1,15 млрд нейронов и 128 млрд синапсов. Принципиальное отличие от существующих бортовых решений — масштаб и гибридность: Hala Point совмещает импульсные нейросети с классическими x86-ядрами, моделирует поведение роёв дронов в реальном времени и обрабатывает 380 трлн синаптических операций в секунду. Это открывает дорогу к бортовым системам, способным не просто реагировать на препятствия, но обучаться прямо в полёте — без перезагрузки и подключения к облаку.
Эксперты оценивают перспективы сдержанно-оптимистично. Аналитики IDC (International Data Corporation — крупнейшая американская компания по исследованию рынков в сфере IT) прогнозируют, что к 2030 году нейроморфные чипы будут стоять в 30% устройств с периферийным ИИ — дронах, автономных машинах, промышленных датчиках.
Эксперты TAdviser (российский аналитический портал в сфере информационных технологий) единодушны: нейроморфные решения критически важны там, где нужна мгновенная реакция при минимальном питании — то есть именно в беспилотниках.
«Они не требуют большой оперативной памяти — вычисления и хранение весов сети происходят прямо в памяти, что критично для автономности», — выделил важное преимущество нейроморфных решений Шамиль Магомедов, специалист по нейроморфным системам, РТУ МИРЭА
🇷🇺 Россия: не только экспертиза, но и реальные разработки
Пока мировые лидеры делают ставку на Intel и крупные исследовательские консорциумы, в России уже существуют собственные нейроморфные платформы — и это не просто концепты на бумаге.
Компания «Мотив НТ» (Новосибирск) разрабатывает нейроморфный процессор AltAI («Алтай») с 2015 года: первый прототип появился в 2020-м, в 2023-м вышел AltAI-2, а в 2025 году анонсирован AltAI-3. Его коммерческая версия с выходом на рынок ожидается в 2026 году. Потребление чипа в 1000 раз ниже, чем у классических ускорителей нейросетей. Процессор уже применяется в системах технического зрения, робототехнике и беспилотных платформах, а в сентябре 2025 года был представлен на форуме «Микроэлектроника». По словам технического директора «Мотив НТ» Валерия Канглера: «Платформа обеспечивает баланс между производительностью, энергопотреблением и размерами — это принципиально важно для рынка микроэлектроники в России».
НПЦ «ЭЛВИС» разработал бортовой чип К1892ВМ21Я — систему на кристалле с DSP-ядрами ELCore-50 и производительностью ~1 TOPS для компьютерного зрения непосредственно на устройстве: без облака, без интернета. Чип уже используется в умных камерах, робототехнике и навигационных системах. По оценкам экспертов Сколтеха, переход к нейроморфным чипам может стать «короткой траекторией» для России в глобальной микроэлектронике — при условии концентрации ресурсов на целевых программах.
🔮 Нейроморфные технологии дают дрону реальное преимущество там, где обычный GPU пасует
И, может, в этом есть своя логика: если дрону нужно часами кружить над полем, замечая малейшие изменения в посевах, — почему бы ему не войти в роль шмеля или стрекозы, которые делают это миллионы лет без единой подзарядки?
- Поиск и спасение в дыму или темноте — нейроморфная камера реагирует на движение, а не на яркость кадра, поэтому дрон «видит» в условиях нулевой видимости, где стандартная оптика слепнет
- Облёт препятствий на высокой скорости — задержка обработки в десятки раз меньше, чем у GPU; дрон успевает среагировать на ветку или провод раньше, чем традиционная система успевает «подумать»
- Многочасовые автономные миссии (мониторинг посевов, патрулирование) — потребление в 3 раза ниже напрямую переводится в увеличенное время полёта без подзарядки.
🚁 Подписывайтесь на GoDrone в соцсетях!
Следите за новинками дронов, обзорами и полезными материалами:
📝 Блог → https://godrone.ru/blog/
💙 ВКонтакте → https://vk.com/godrone
🟡 Дзен → https://dzen.ru/godrone
✈️ Telegram → https://t.me/GoDrone
💬 MAX → https://max.ru/join/9GRBZDriZBr_Ek0Z6cKdhYM9qBxpBBkQuhR9VcNJrgM
▶️ YouTube → https://www.youtube.com/@GoDronethefuture
🎬 RuTube → https://rutube.ru/channel/37715711/