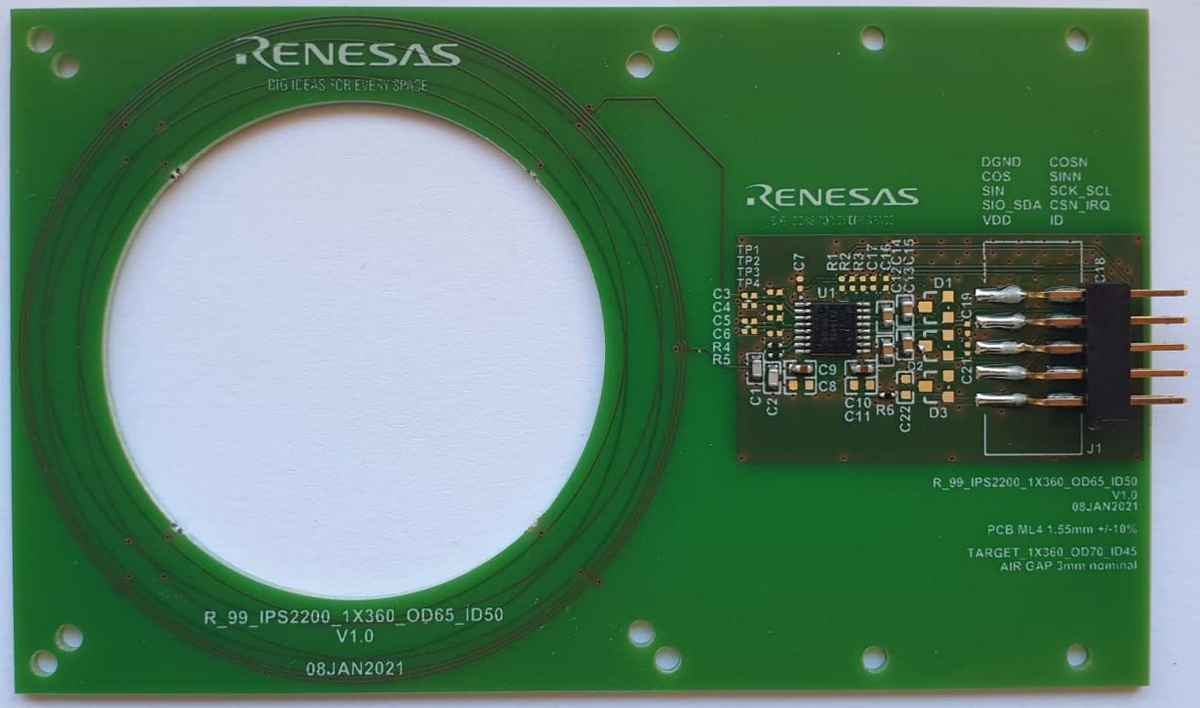
Индуктивные датчики положения, сформированные на печатных платах.
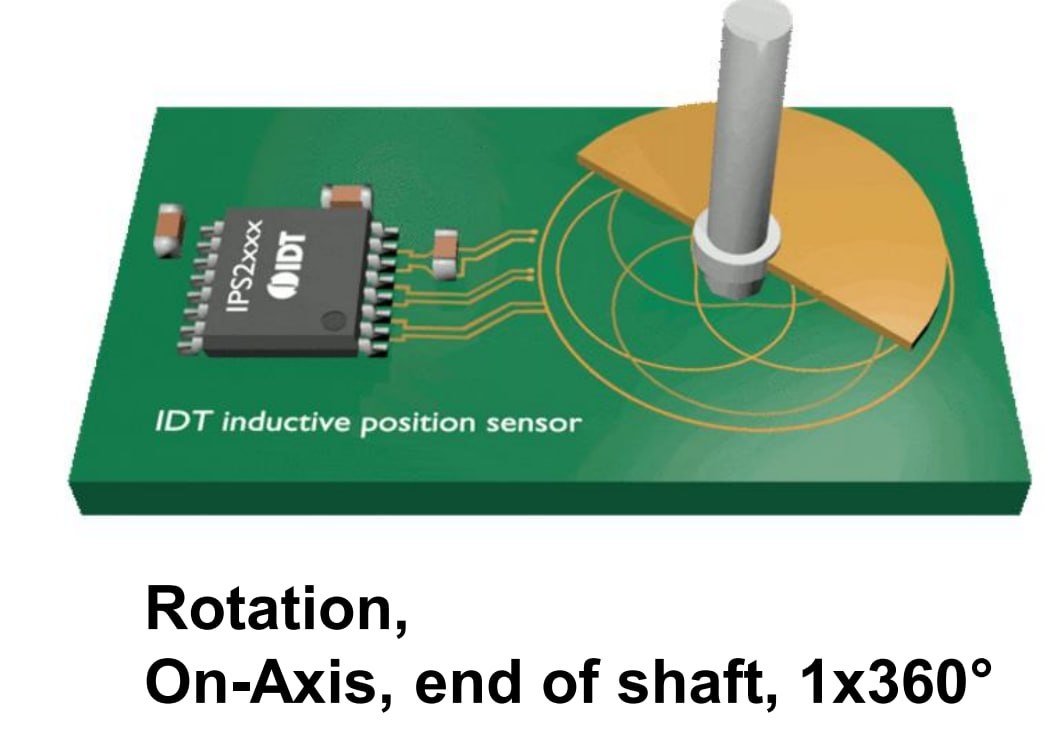
Такие датчики по сути являются разновидностью синусно-косинусных вращающихся трансформаторов с неподвижными обмотками или, что то же самое, резольверами.
Из серьезных отличий тут это частоты работы, они составляют в среднем 2-5 МГц и это накладывает свои особенности на декодировние сигналов с них.
Как устроены традиционные автомобильные резольверы и как декодировать с них сигналы я показывал тут и их демодуляцию на STM32 тут. Там частоты идут в районе от единиц до десятков кГц.
Я использовал ЦАП и АЦП на STM32 чтобы выполнить формирование возбуждающего сигнала и синхронную демодуляцию сигналов sin-cos.
К сожалению, применить такое же простое решение для частот в МГц уже не так просто.
Задача может быть решена разными методами. Ряд компаний производят интегральные решения в виде микросхем с прямой аналоговой демодуляцией
Вся суть в аналоговом умножении возбуждающего сигнала Tx на принятые сигналы с обмоток Rx-cos и Rx-sin. После этого преобразования в сигнале остается только низкочастотная составляющая, несущая информацию о угловом положении мишени.
Затем эти сигналы могут оцифрованы любым обычным АЦП и угол вычислен через функцию atan2.
Это с одной стороны и самый простой путь, но с другой стороны требует либо специализированной микросхемы, либо построения собственного аналогового демодулятора на МГц-вые частоты, например на микросхеме AD835. Как вариант строить свой аналоговый умножитель на дискретной компонентной базе.
Другой путь синхронная цифровая демодуляция, отличается тем, что нам нужно захватывать Rx сигналы каждый раз в одной и той же временной точке и желательно на максимуме волн. Для успеха тут требуется АЦП с коротким временем выборки. Как минимум на порядок быстрее чем сами сигналы Rx (2-5МГц).
И есть еще одна небольшая лазейка которую я хочу попробовать дабы сделать максимально простое устройство декодирования. Использовать встроенный низкоскоростной АЦП микроконтроллеров (1-2Мвыб/c), но оцифровывать сигнал захваченный быстрым внешним УВХ (устройством выборки и хранения), построенным буквально на одном MOSFET.
При этом я, вероятно, смогу сделать синхронную демодуляцию, так как и формированием сигнала Tx и управлением УВХ будет заниматься один МК.
Сигнал возбуждения Tx можно в простейшем случае сформировать из выхода ШИМ таймера МК, который можно настроить в районе единиц МГц.
Общая идея в том, чтобы быстро и синхронно захватывать сигналы RX и потом уже медленно обрабатывать в АЦП МК.
Это даст не самую высокую скорость получения новых данных о угле, но скорее всего будет достаточно для широкого круга применений.
И в заключение, компания Renesas представила датчики такого типа как замену автомобильных систем позиционирования ротора, что является огромным рынком.