ШАГ 3. УРАВНЕНИЕ ДЛЯ МИНИМАЛЬНОЙ СИСТЕМЫ (2 ОСЦИЛЛЯТОРА)
Обозначим φ_(AB(t))— фаза, которую осциллятор A "думает" о состоянии B в момент своего локального времени t. Она равна реальной фазе θ_B, но взятой в более ранний момент времени t-R_AB/c.
Тогда динамика фазы осциллятора A
Собственная частота + стремление подстроиться под воспринимаемую фазу соседа.
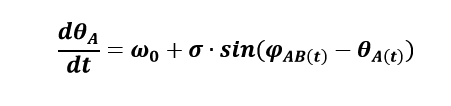
где σ — константа связи.
Но φ_(AB(t))=θ_(B(t)) (t-R_AB/c).
Аналогичное уравнение для B.
Уравнения для двух осцилляторов:
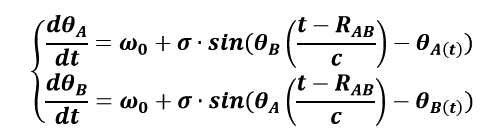
Здесь R_AB— не координата в пространстве, а первичная величина, определяемая через калибровочную константу c и измеренную задержку.
Допустимое решение (2ОС.1): Полная синхронизация.
Если σ достаточно велико, система приходит к решению:
При этом возникает стабильная взаимная задержка R_AB/c, которая воспринимается как фиксированное расстояние. Пространство родилось.
Допустимое решение (2ОС.2): Неудача синхронизации.
Если σ мала или начальные условия плохие, осцилляторы не синхронизируются. Они существуют как не связанные сущности. Между ними нет связного пространства-времени, есть только два независимых циклических процесса.
ШАГ 4. ТРИ ОСЦИЛЛЯТОРА И РОЖДЕНИЕ ГЕОМЕТРИИ
Добавляем третий осциллятор C. Теперь у нас три попарных расстояния: R_AB, R_BC, R_AC. Ключевой момент: Эти три величины не независимы. В стабильном, синхронизированном состоянии они должны удовлетворять соотношению треугольника:
R_AC ≤ R_AB + R_BC (в некоторой метрике).
Почему? Потому что если C синхронизирован с A и с B, то информация от A к C может идти как напрямую (задержка R_AC/c ), так и через B (суммарная задержка (R_AB+R_BC)/c ). Прямой путь не может быть медленнее опосредованного в синхронизированной сети (иначе он не использовался бы). Это накладывает ограничение на возможные задержки, которое математически тождественно аксиоме треугольника в метрическом пространстве.
Система (3ОС): Уравнения аналогичны (2ОС), но для каждой пары. Динамика стремится найти такое множество попарных задержек {R_ij }, которое:
- удовлетворяет условиям треугольника.
- позволяет всем трём осцилляторам достичь взаимной синхронизации.
Множество таких допустимых наборов {R_ij }, для N точек изоморфно множеству конфигураций точек в трёхмерном евклидовом пространстве (с точностью до изометрии). Трёхмерность возникает как минимальная размерность, достаточная для вложения графа произвольных попарных расстояний, удовлетворяющих условиям треугольника и более сложным симплексным условиям для N>3.