Ситуация: Многие предприятия считают, что достаточно установить 3D-сканер на робота — и автоматизация контроля готова. Но настоящая автоматизация означает автономную работу системы: стабильную точность, воспроизводимость результатов и интеграцию в производственную линию без участия оператора.
Вопрос: как правильно выбрать технологию 3D-сканирования для такой задачи — лазерный сканер на роботе или систему структурированного света?
В первой части нашего обзора-сравнения мы подробно рассмотрим, как происходят бесконтактные измерения с помощью лазерной линии и структурированного света. Во второй части изучим систему с лазерным сканером и систему структурированного света, а также подробно рассмотрим состав этих систем.
В третьей, заключительной части обзора-сравнения рассмотрим программирование систем, особенности обработки и хранения данных, а также вопросы обслуживания и возможности получения гарантии. Завершим обзор сравнительной таблицей, в которой в сжатой форме представим основные результаты сравнения систем.
Лазерная линия и структурированный свет: в чем разница?
Лазерный сканер работает по принципу измерения расстояния до объектов путем измерения времени прохождения отраженного луча лазера обратно к приемнику (метод триангуляции). Время прохождения лазерного импульса туда-обратно фиксируется системой, используя известное расстояние до точки и углы отклонения луча относительно оси вращения зеркала, вычисляются координаты каждой точки пространства. Данные всех зарегистрированных точек собираются в облако, формируя трёхмерную модель объекта. В дальнейшем полученное облако точек обрабатывается специальными алгоритмами, преобразуется в полигональную модель для последующей визуализации и анализа.
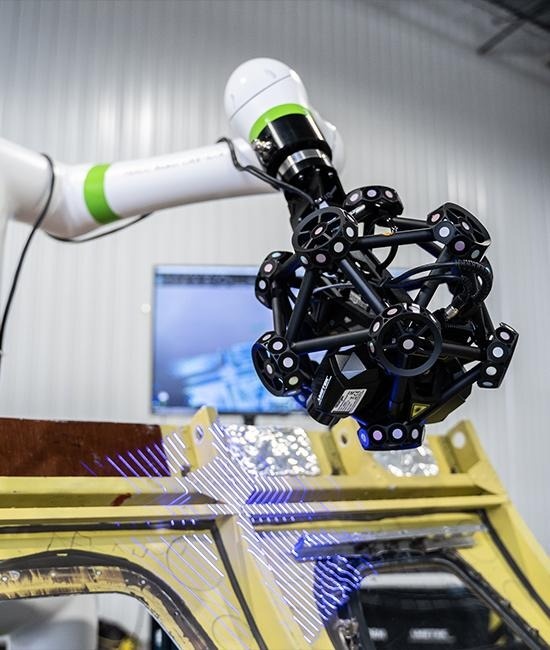
Сканер структурированного света работает по иному принципу. Он проецирует на измеряемый объект световой шаблон, камеры фиксируют изменения структуры света, так как измеряемый объект искажает первоначальную световую сетку. Специальное программное обеспечение обрабатывает зафиксированные изображения, сравнивая деформацию шаблона на изображениях с исходным проектом и вычисляя координаты точек поверхности объекта в пространстве.

В задаче автоматического сканирования необходимо надежно и достоверно получать облако точек всех интересующих участков поверхности. В зависимости от объекта сканирования и средства измерения помешать этому могут как внешние, так и внутренние факторы. Например, на деталях штамповки необходимо различать границы элементов в материале малой толщины, элементы при этом могут иметь отражающую поверхность. Если система недостаточно надежна, то результаты сканирования таких элементов не будут повторяемы и достоверны даже с использованием оптимальных настроек. Надежность системы в этом случае складывается из ее разрешающей способности (плотности точек в облаке), точности определения положения точек в облаке, способности точно распознавать поверхности с переменными свойствами материала и корректной постобработки, фильтрации и сглаживания без искажения действительных размеров.
С учетом сказанного, для обеспечения необходимого и достаточного качества автоматического сканирования следует применять сканирующие системы с наиболее высокими эксплуатационными характеристиками: даже небольшое отклонение от них может существенно повлиять на ход процесса измерений.
Сравним лазерные сканеры и сканеры структурированного света по ряду пунктов:
Качество интеграции в автоматическую систему
Лазерный сканер изначально создавался как ручной инструмент, в дальнейшем по необходимости адаптированный для работы в автоматической системе. Подобная адаптация имеет определенные ограничения – короткое время автономной работы без перегрева, необходимость в перекалибровке, потеря синергии с другими исполнительными органами системы.
Сканер структурированного света изначально разрабатывался как средство автоматического контроля, аппаратно и программно готовое к интеграции в автоматическую станцию и автоматическую производственную линию (если принимать во внимание высокоточные сканеры, а не бюджетные модели, которые рассчитаны на рынок ручных устройств).
Разрешающая способность
Сканирование лазерной линией имеет принципиальное ограничение — ширина этой линии. Для надежного распознавания на поверхности детали линия должна иметь некоторую ширину: так отраженного света будет достаточно для реконструкции точек. Ширина линии служит аппаратным сглаживанием, так как сканер не может распознать изменение формы поверхности под линией по ширине — форма считывается только вдоль линии. И несмотря на заявленные точности лазерных сканеров, они не распознают мелкие детали поверхности.
Сканеры структурированного света работают иначе: они проецируют переменный по частоте и фазе световой шаблон в виде контрастных полос — светлых и темных. Проекция структурированного света динамическая, поэтому сам сканер в процессе сканирования должен оставаться неподвижным — так осуществляется переход от непрерывного сканирования в реальном времени к фотографической съемке, где вся поверхность в поле зрения сканера захватывается за один кадр. Время экспозиции одного кадра — от 0,2 сек., точность расположения всех точек в кадре — от 5 мкм, что само по себе превосходит возможности лазерных сканеров. Форма поверхности определяется за счет искривления границы контрастных полос структурированного света. Толщина границы –– это бесконечно малая величина, которую можно различить тем лучше, чем выше разрешающая способность оптического устройства. Закономерно, что качество распознавания этой границы напрямую определяет детализацию сканирования: чем больше разрешающая способность камер, тем выше детализация. Более точные системы используют камеры 12 Мп и более с объективами большой светосилы. За счет этого сканеры структурированного света позволяют сканировать с большим разрешением и захватывать мельчайшие детали поверхности с высокой точностью.
Процесс сбора данных
Лазерный сканер проецирует сетку линий неподвижно относительно самого себя, и процесс сканирования требует контролируемого перемещения сканера по траектории сканирования: необходимо «закрашивать» поверхность, многократно проходя один и тот же участок. Если это не является большой проблемой в ручных измерениях, то при переходе к роботизированным системам это значительно снижает эксплуатационные характеристики.
Сканер структурированного света выполняет фотографическую съемку и позволяет пользоваться способом программирования робота «от точки до точки» — PTP (point to point). Это облегчает программирование и контроль качества сбора данных.
Потребность в маркерах
Лазерный сканер может работать только с маркерами или в поле зрения отслеживающего устройства. При работе с маркерами автоматизированная станция вообще перестает быть таковой, требуя постоянного размещения маркеров на детали и последующего их удаления. Автоматизировать такой процесс — отдельная задача, для многих деталей она вообще не может быть решена адекватными средствами. Размещение маркеров на оснастке тоже есть, но приводит к аналогичному результату — значительно снижает автономность системы. Только в редких случаях возможно разместить оснастку без помех для крепления и сканирования детали.
Потребность в локаторе
При работе с отслеживающим устройством, имеющим собственную погрешность определения расположения сканера, погрешность расположения накладывается на погрешность сканирования и в результате показывает совокупное отклонение порядка десятых долей миллиметра –– при условии, что само отслеживающее устройство не испытывает никаких внешних воздействий, чего в реальном рабочем пространстве избежать невозможно. Как следствие, погрешность возрастает еще больше. В критических ситуациях может произойти ошибка сшивки, которую потребуется устранять вручную. При работе с отслеживающим устройством нельзя допускать потери визирования сканера этим устройством, поверхности в слепой зоне отсканировать не удастся. Это является дополнительным осложняющим фактором программирования такой системы.
Далее в качестве лазерных систем будет рассмотрен только вариант системы с лазерным сканером в поле зрения отслеживающего устройства, вариант сканирования с маркерами рассмотрен не будет, так как он едва ли может претендовать на роль автоматического решения.
Сканеры структурированного света в общем случае тоже работают по маркерам, потому что не имеют фиксированной точки начала координат в измерительном пространстве системы. Однако, INTEGRA Scala имеет уникальное решение для автоматической работы — создание матрицы преобразования снимков. Это данные о пространственном положении каждого кадра, полученные при помощи сшивки по маркерам на одной детали, но воспроизводимые посредством высокоточных позиционеров — робота, рельс-направляющей и поворотного стола. Началом координат служит первый снимок в серии. После создания матрицы преобразования снимков не требуется нанесение маркеров на последующие детали, а необходимая повторяемость установки детали составляет порядка нескольких миллиметров, что может быть выполнено даже от руки. Это дает системе возможность бескомпромиссно работать в автоматизированных линиях.
Во второй части нашего обзора-сравнения мы продолжим изучать систему с лазерным сканером и систему структурированного света и подробно рассмотрим состав этих систем.
Если перед вами стоит задача внедрения автоматического 3D-контроля, важно заранее оценить, какая технология сканирования действительно сможет обеспечить необходимую точность, повторяемость и стабильность процесса на производстве.
Команда МС Метролоджи более 25 лет помогает предприятиям внедрять высокоточные измерительные системы и интегрировать их в производственные линии.
Оставьте заявку, и мы разберём ваши производственные задачи и подберём оптимальное решение.
Подробнее о промышленных автоматизированных измерительных системах Integra Scala AutoBox — на нашем сайте.