Sesame — это доступный проект робототехники с открытым исходным кодом, основанный на микроконтроллере ESP32, с акцентом на выразительность и движение.

Этот проект для любителей и инженеров любого уровня подготовки!
Sesame предлагает динамичную платформу, разработанную для начала работы с шагающими роботами.
Для создания робота Sesame вам потребуются базовые навыки пайки, 50-60 долларов на аппаратные компоненты, доступ к 3D-принтеру и базовое понимание Arduino IDE.
В архиве в конце статьи содержатся файлы САПР, файлы STL, руководства по сборке и подключению, а также базовая/расширенная прошивка для контроллера на базе ESP32. Также включена отладочная прошивка, которая может помочь в запуске и настройке робопаука
Особенности:
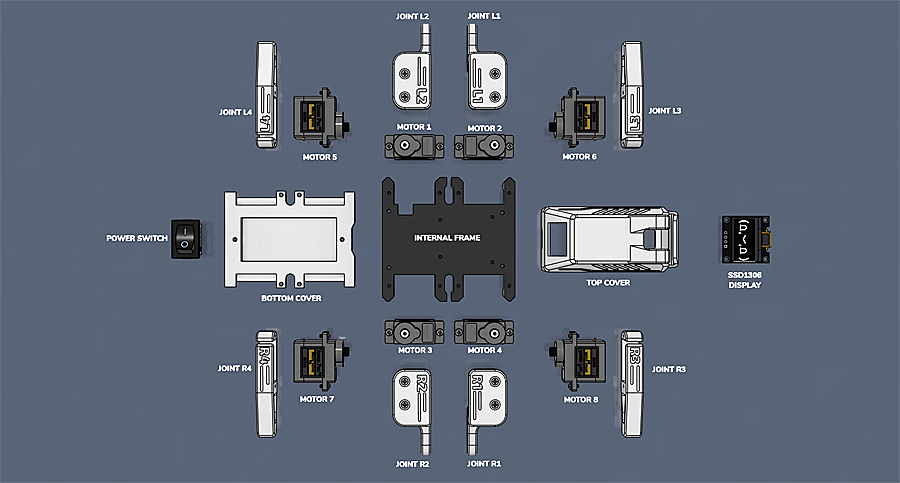
- Четвероногое строение: использует 8 сервомоторов (по 2 на каждую ногу), что обеспечивает примерно 8 степеней свободы.
- Эмоциональный дисплей: оснащен OLED-экраном с разрешением 128x64, который реагирует на движения.
- Полностью пригоден для печати: разработан исключительно для 3D-печати из PLA-пластика с минимальным количеством поддержек.
- Подключение к сети: Подключитесь к вашей сети Wi-Fi для удаленного управления и доступа к API.
- JSON API: RESTful API для программного управления из Python, JavaScript и других языков.
- Conversational Faces: Библиотека выразительных эмоций с вариантами речи для проектов голосовых помощников.
- Sesame Studio: Новое программное обеспечение для создания анимации, позволяющее легко создавать собственные движения.
- Приложение Sesame Companion: приложение на языке Python для голосового управления и расширенных интерактивных функций.
- Последовательный интерфейс командной строки: управляйте роботом и запускайте анимацию через последовательный интерфейс командной строки или веб-интерфейс.
- Предварительно запрограммированные эмоции: включают анимацию ходьбы, махания рукой, танцев, указания пальцем, отдыха и многое другое.
Посмотрите видеоролик о сборке и запуске
Видео располагается на моем канале.
Как сделать робота паука своими руками
Соберите детали
Полный список необходимой электроники и оборудования см. в спецификации материалов (BOM в архиве) .
- Микроконтроллер: Lolin S2 Mini (рекомендуется для самодельных сборок) или ESP32-DevKitC-32E с Distro Board V1 (устаревшая версия).
- Исполнительные механизмы: 8 сервоприводов MG90.
- Питание: источник 5В 3А (USB-C PD для S2 Mini и V2 Distro Board или батарея + понижающий преобразователь; см. спецификацию для варианта с 2 литий-ионными батареями 10440 и держателем для 2 батареек AAA).
Печать деталей
Скачайте файлы STL и следуйте инструкциям по печати (hardware/printing/README.md в архиве).
- Предназначено для PLA-пластика.
- Требуется минимальное количество опор.
Сборка и подключение проводов
Следуйте инструкциям по сборке (docs/build-guide/README.md) и подключению проводов (docs/wiring-guide/README.md) , чтобы собрать раму и подключить электронику.
Прошивка
Загрузите код из каталога прошивки (firmware/README.md).
- Требуется Arduino IDE.
- Настройка параметров точки доступа Wi-Fi
Создание анимаций
Используйте Sesame Studio (software/sesame-studio/README.md) для визуального проектирования поз и последовательностей движений для вашего робота.
Программное обеспечение и микропрограммы
Sesame Studio — это автономное настольное приложение, входящее в состав пакета software/sesame-studio/.
Оно позволяет вам:
- Визуально определите положение робота, используя схематический интерфейс.
- Автоматическая генерация кода на C++ для управления углами поворота сервоприводов.
- Создавайте сложные анимации, объединяя кадры в последовательность.
Приложение Sesame Companion — это приложение на языке Python, обеспечивающее расширенное управление и взаимодействие с вашим роботом по локальной сети. Оно использует новый API JSON и возможности сетевого режима для предоставления следующих возможностей:
- Интеграция с голосовым помощником: управляйте Sesame с помощью голосовых команд и наблюдайте за выражением эмоций в реальном времени.
- Дистанционное управление: управляйте роботом из любой точки вашей локальной сети.
- Управление выражением лица: Динамическое изменение выражений лица в зависимости от разговора или контекста.
- Примеры API: Эталонная реализация для создания собственных интеграций.
Приложение Companion работает с роботами, на которых установлена последняя версия прошивки с включенным сетевым режимом.
Прошивка
Прошивка ESP32 ( firmware\sesame-firmware-main.ino) отвечает за кинематику, отображение лица и интерфейс управления по Wi-Fi.
- Веб-интерфейс: управляйте роботом со своего телефона через встроенную точку доступа.
- Пользовательские грани: добавьте собственные растровые изображения (инструкция в документации к прошивке).
Программное обеспечение и файлы для печати
Файлы для печати (STL и CAD файлы для доработки), инструкции по сборке, настройке, прошивке и тд, видео сборки, файлы прошивки, ПО для настройки и создания своих движений, список электроники и тд - все это находится в моем блоге.
Всем легкой сборки и интересных развлечений!
С уважением, Константин.