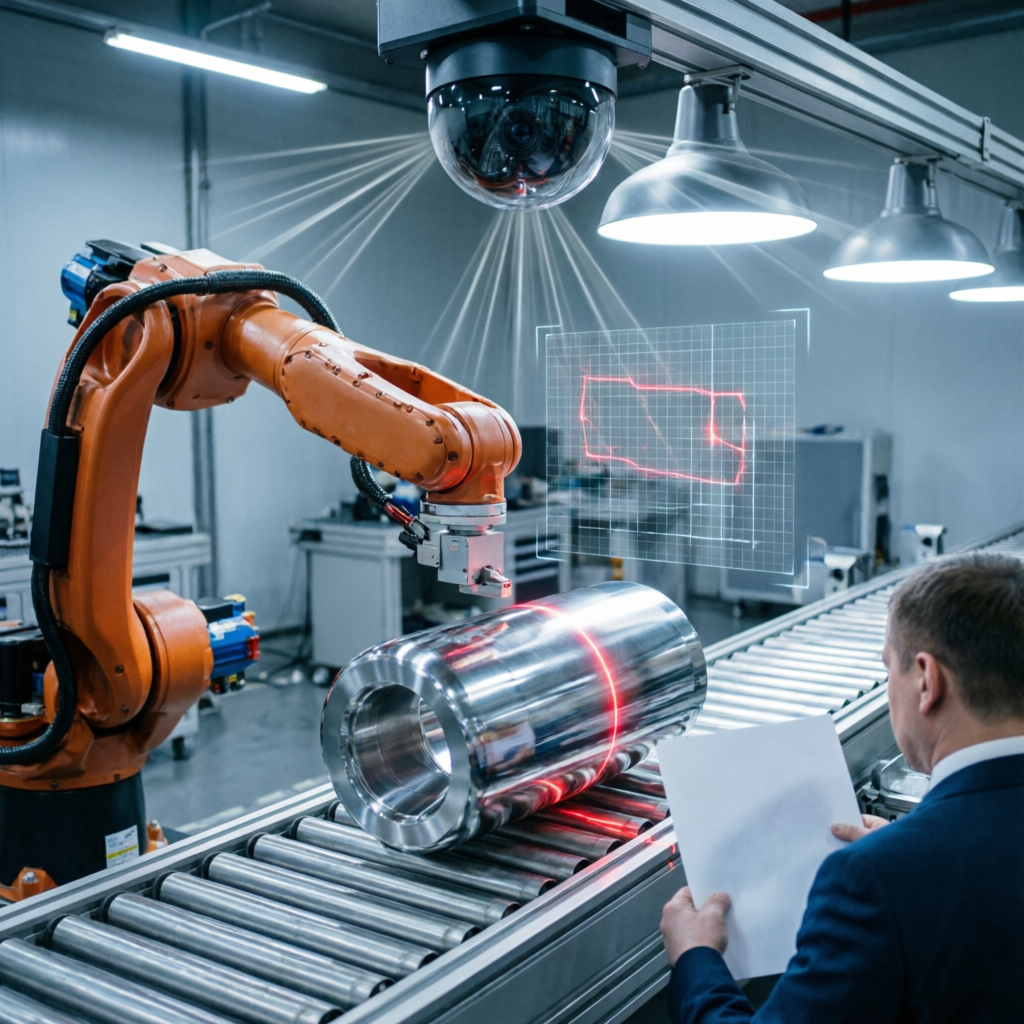
Представьте: роботу нужно найти и захватить деталь в цеху, но она - глянцевая, стоит под ярким светом, а лазерная метка на ней почти сливается с фоном. Обычные системы навигации в таких условиях терпят неудачу. Но не новая разработка учёных Южно-Уральского государственного университета.
Исследователи создали уникальную систему локализации объектов, которая работает даже при сильных оптических помехах - бликах, тенях, отражениях и частичном закрытии цели.
🔍 Как это работает?
Вместо дорогих лидаров или сложных стереокамер система использует:
- одну панорамную камеру с углом обзора 180°,
- линейный лазер (650 нм),
- интеллектуальный алгоритм, который восстанавливает лазерную полосу даже если она «разорвана».
Алгоритм действует как цифровой реставратор:
→ отсеивает шумы в цветовом пространстве,
→ «сшивает» разрывы линии с помощью морфологических операций,
→ строит трёхмерную модель положения цели на основе одной проекции.
Результат?
- Средняя ошибка позиционирования - всего 5,57 мм (против 18 мм у стандартных методов).
- Глубина реконструируется на 69% точнее.
- Время обработки - 0,5 секунды, что достаточно для большинства промышленных задач.

💡 Почему это прорыв?
- Импортозамещение
Стоимость комплекта (камера + лазер) - около 10 000 рублей.
Аналогичный зарубежный лидар - сотни тысяч. - Компактность и надёжность
Меньше датчиков = меньше точек отказа, проще калибровка, выше стабильность. - Универсальность
Технология подходит для: сортировки деталей на конвейере,
работы в агрессивной оптической среде (металл, стекло, жидкости),
ячеек автоматизации, где нет места для громоздких сенсоров.
🔬 Где уже тестируется?
Метод протестирован на реальном роботизированном манипуляторе SCARA.
В экспериментах по захвату объектов средняя ошибка не превысила 6,4 мм - этого достаточно для точной сборки, упаковки или контроля качества.
Исследование опубликовано в международном журнале Ain Shams Engineering Journal (Q1, TOP 1% по Web of Science), что подтверждает мировой уровень разработки.
⏳ Что дальше?
Главный «узкий» этап - распознавание объекта нейросетью (занимает ~2,9 сек).
Команда ЮУрГУ планирует оптимизировать его с помощью:
- более лёгких архитектур ИИ,
- аппаратного ускорения на российских чипах.
Цель - выйти на полный цикл в реальном времени.
💬 А вы сталкивались с проблемами машинного зрения в производстве?
Как думаете - будущее за «умными камерами» или всё же за лидарами?
Делитесь мнением в комментариях!
#робототехника #ЮУрГУ #машинноезрение #импортозамещение #промышленность #инновации #Терпланпроект