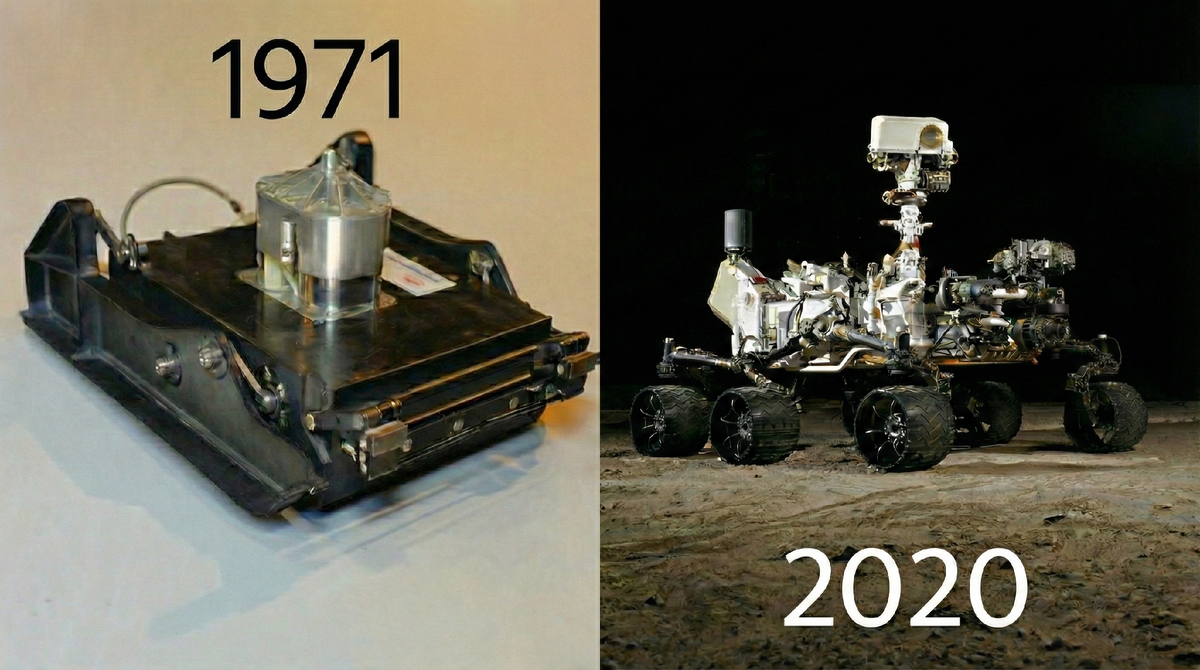
Первый марсоход был построен не в США. Его создали в СССР в 1971 году, и это была странная машина. Prop-M не имел колес - он передвигался на двух широких плоских лыжах, закрепленных на манипуляторах, которые медленно переставляли его вперед, словно костыли. Аппарат был привязан к посадочному модулю 15-метровым силовым кабелем, как собака на поводке.
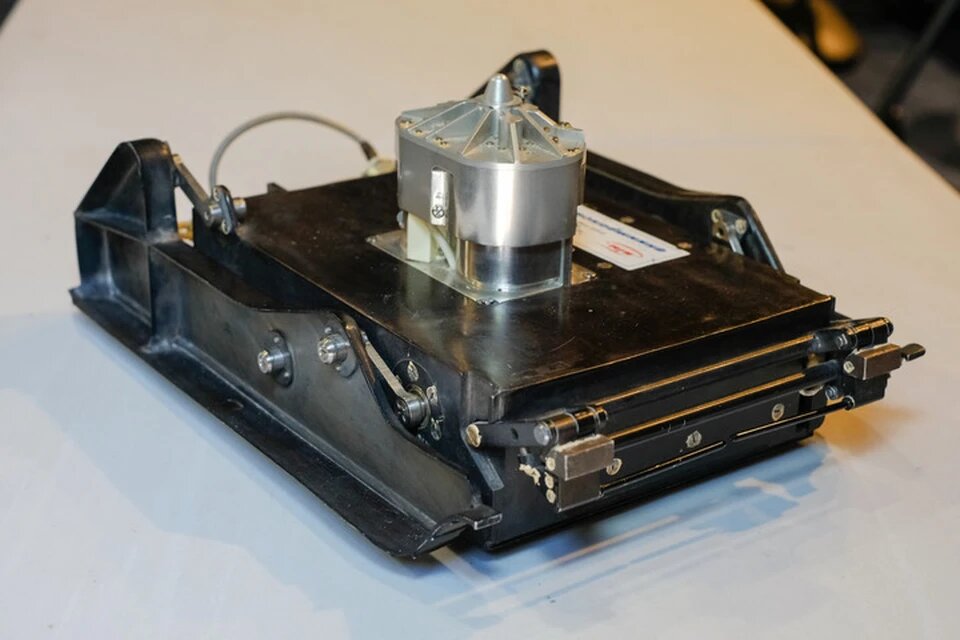
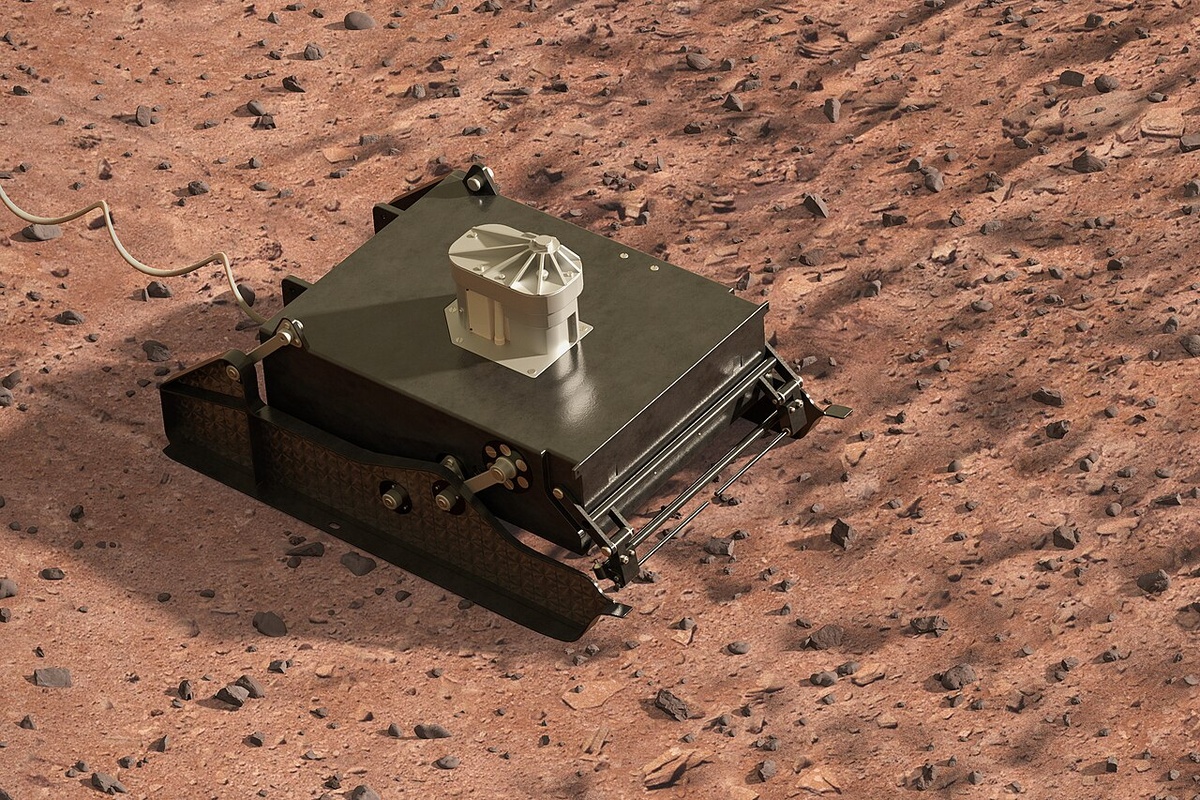
Это был металлический ящик длиной всего 21 см, шириной 16 см и весом 4,5 кг. Его единственная задача - использовать встроенный зонд для измерения плотности марсианского грунта.
Prop-M добрался до Марса на борту станции "Марс-3", которая стала первым рукотворным объектом, совершившим мягкую посадку на поверхность красной планеты. Но триумф длился 14 секунд. Ровно столько работал передатчик, прежде чем связь оборвалась навсегда. Единственное, что успела передать станция на Землю - размытое черно-белое пятно вместо изображения. Prop-M так и не был развернут.
Viking: первые настоящие снимки Марса
Наша первая успешная миссия по изучению Марса вблизи началась в середине 1970-х с посадочных аппаратов NASA Viking. Это были не роверы, а стационарные научные платформы - кластеры приборов, которые совершили эпическое путешествие к поверхности красной планеты и передали первую достоверную информацию о составе марсианского грунта.
NASA запустило Viking 1 и Viking 2 летом 1976 года, чтобы использовать окно сближения между Землей и Марсом - такая возможность открывается только раз в 26 месяцев.
По прибытии оба зонда вернули первые детальные фотографии марсианской поверхности. И вот что мы увидели: каменистую пустыню красно-коричневого цвета, усыпанную валунами.
Разместив два посадочных модуля в разных регионах планеты, NASA получило максимально разнообразную выборку. Но это были всего лишь две горсти песка на планете размером с пустыню. Шансы найти древнюю окаменелую марсианскую бактерию таким методом были близки к нулю.
Поэтому посадки на Марс были приостановлены на два десятилетия, пока NASA работало над решением проблемы исследования Великого Неизвестного.
Sojourner: машинка на радиоуправлении на другой планете
В декабре 1996 года NASA было готово отправить новый груз на Марс - миссию Pathfinder. Снова это была научная станция, которая развернулась на поверхности, обнажив набор телескопов, камер и измерительных приборов. Но Pathfinder привез с собой кое-что еще - небольшой прототип транспортного средства. Sojourner.
Все, кто жил в конце 90-х, помнят этот момент. Первый американский марсоход стал иконой поп-культуры. Это было невероятно: мы управляли машинкой на радиоуправлении на другой планете за миллионы километров от Земли. Будущее наступило.
Sojourner был технологической демонстрацией. Никто не знал, что произойдет, когда ты попытаешься управлять крошечной машиной на расстоянии миллионов миль на поверхности чужой планеты. Но был только один способ это выяснить.
Первый марсоход был размером и весом с микроволновую печь - всего 10 кг. У него было шесть колес, каждое с собственным электромотором, и экспериментальная новая система подвески, которую назвали rocker-bogey.
Это две связанные между собой руки, которые соединяют колеса с корпусом. Длинная рука спереди называется rocker (качалка), короткая сзади - bogey (тележка). Такая конструкция позволяет каждому колесу поворачиваться независимо, чтобы все шесть оставались в постоянном контакте с поверхностью.
Благодаря Viking мы знали, что Марс - это не гладкая песчаная пустыня. Он усыпан небольшими кусками острых камней. И последнее, чего хотели инженеры NASA, - чтобы их новый ровер преодолел миллионы миль через космос только для того, чтобы застрять на первом же валуне, не успев ничего исследовать.
С этой высокотехнологичной подвеской ровер мог безопасно преодолевать препятствия высотой до трети собственного размера. На знаковой фотографии, сделанной камерой посадочного модуля, мы видим, как ровер проводит детальный осмотр большого валуна.
Поскольку этот ровер находился на такой ранней стадии разработки, он не нес много научного оборудования - это по-прежнему было задачей стационарной платформы. Но Sojourner был оснащен передним инструментом - альфа-протонным рентгеновским спектрометром, который позволял определять химический состав любого камня, к которому он мог подъехать.
Ровер даже получил раннюю форму автономного вождения - не так уж отличающуюся от современных автомобилей. Он использовал комбинацию камер и лазеров для идентификации препятствий и маневрирования по марсианскому ландшафту.
Поскольку команда NASA на Земле могла связываться с ровером только раз в день, они фактически устанавливали контрольную точку, к которой ровер должен был двигаться, а на следующий день проверяли, куда он в итоге приехал.
Процесс исследования был медленным: за три месяца работы ровер проехал всего около 100 метров. Звучит немного, но это была значительно лучшая производительность, чем ожидали ученые NASA. И это дало космическому агентству достаточно уверенности, чтобы удвоить ставку на марсоходы - причем очень серьезно.
Spirit и Opportunity: близнецы-рекордсмены
Если один маленький ровер смог работать 83 дня и захватить воображение всего мира, представьте, что могут сделать два больших марсохода. Это был план NASA с марсоходами Spirit и Opportunity.
Обе машины были запущены на отдельных ракетах Delta II летом 2003 года, снова используя то самое короткое окно для перелета на Марс. На этот раз вместо посадочного модуля, который развертывал отдельный ровер, сам посадочный модуль был ровером. После сброса защитной посадочной оболочки каждый ровер развернул солнечные панели, научные инструменты и колеса, а затем отправился в марсианскую пустыню.
Очень сложно понять, насколько большие эти машины на самом деле, потому что на Марсе нет знакомых нам ориентиров для сравнения. Sojourner был размером с микроволновку. Spirit и Opportunity были ближе к размеру гольф-каров.
NASA просто масштабировало шестиколесную систему rocker-bogey, чтобы создать роверы следующего поколения. Дополнительный размер и возможности позволили впервые сделать полностью мобильной всю коллекцию научных инструментов, которые раньше оставались на стационарном модуле.
В верхней части 1,5-метровой мачты каждый ровер имел девять цифровых камер. Они использовались как для навигации, так и для создания трехмерных панорамных изображений марсианского ландшафта. У ровера также был основной спектрометр, размещенный на конце роботизированной руки, которая выдвигалась спереди для более детального изучения камней и грунта.
Со всеми улучшениями по сравнению с предшественником, роверы-близнецы смогли провести на порядки больше исследований и сбора данных, чем любая предыдущая марсианская миссия.
Spirit проработал 6 лет и проехал 7,7 км - впечатляющий результат. Но Opportunity превзошел все ожидания: 14 лет работы и 45 км по чужому ландшафту, пока наконец не пал жертвой гигантской марсианской пылевой бури, которая покрыла солнечные панели ровера и полностью разрядила батарею.
Роверы планировались на 90 марсианских дней (солов). Они пережили свой запланированный срок службы в 50 раз.