Nodes in Nuke PointCloudGenerator
С помощью узла PointCloudGenerator (только в NukeX и Nuke Studio) вы можете создать плотное облако точек на основе информации, сгенерированной CameraTracker, и использовать это плотное облако точек для создания 3D-сеток из вашего 2D-видеоматериала. Плотные облака точек являются полезной отправной точкой для 3D-моделирования и позиционирования объектов в сцене.
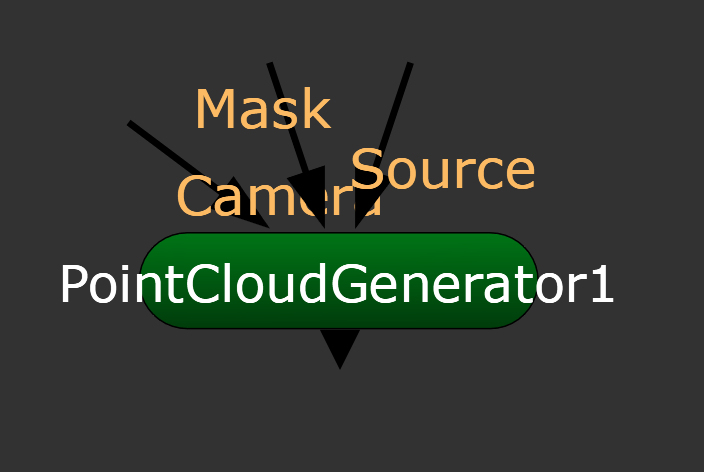
Input
Camera - Траектория движения камеры в сцене, из которой вы планируете создать плотное облако точек.
Mask - Дополнительное изображение для использования в качестве маски. По умолчанию облако точек ограничивается нечерными областями маски.
Сначала поле ввода маски отображается в виде треугольника справа от узла, но при перетаскивании оно превращается в стрелку с надписью «маска». Если вы не видите поле ввода маски, убедитесь, что элемент управления маской отключен или установлен в значение «none».
Source - Исходные видеоматериалы, из которых была получена информация о камере.
PointCloudGenerator Tab
display
Настраивает характеристики отображения точек. Эти параметры не влияют на результат рендеринга сцены; они предназначены только для отображения в 3D-просмотрщике.
• off — скрывает точки.
• wireframe — отображает только контуры точек.
• solid — отображает все точки сплошным цветом.
• solid+wireframe — отображает точки сплошным цветом, включая их вершины.
• textured — отображает только текстуру поверхности.
• textured+wireframe — отображает каркас плюс текстуру поверхности.
selectable
При включении этой функции вы можете делать выбор в окне просмотра как обычно. При отключении этой функции выбор или изменение точек становится невозможным.
render
Определяет способ отображения точек. Этот параметр не зависит от выбора способа отображения, но имеет те же настройки. display
cast shadow
При включении этой функции объект может отбрасывать тени.
receive shadow
Если эта функция включена и к объекту добавлен шейдер материала, объект может получать тени.
Principal View
Задает основной ракурс, в котором анализируются треки и применяется входной параметр «Маска». Вторичная камера рассчитывается относительно этой основной камеры.
Этот элемент управления отображается только в том случае, если в настройках проекта задано более одного ракурса (обычно, если вы работаете над стереоскопическим проектом).
Ignore Mask
Установите тип маски, чтобы исключить области последовательности во время генерации:
• None — ни один фрагмент видеоряда не игнорируется.
• Source Alpha — используйте альфа-канал исходного клипа, чтобы определить, какие области следует игнорировать.
• Source Inverted Alpha — используйте инвертированный альфа-канал исходного клипа, чтобы определить, какие области следует игнорировать.
• Mask Luminance — используйте яркость входного сигнала маски, чтобы определить, какие области следует игнорировать.
• Mask Inverted Luminance — используйте инвертированную яркость входного сигнала маски, чтобы определить, какие области следует игнорировать.
• Mask Alpha — используйте альфа-канал входного сигнала маски, чтобы определить, какие области следует игнорировать.
• Mask Inverted Alpha — используйте инвертированный альфа-канал входного сигнала маски, чтобы определить, какие области следует игнорировать.
Set Keyframes
Analyze Sequence
Нажмите, чтобы автоматически проанализировать последовательность и установить необходимые ключевые кадры для использования при создании облака точек.
Примечание: Ключевые кадры выбираются таким образом, чтобы обеспечить достаточно большую базовую линию камеры для триангуляции точек, но при необходимости вы можете добавлять и удалять ключевые кадры вручную.
Keyframes
Отображает кадры, используемые для отслеживания точек во входной последовательности. Показаны как автоматические, так и ручные ключевые кадры.
Add
Нажмите, чтобы установить ключевой кадр на текущем кадре.
Delete
Нажмите, чтобы удалить ключевой кадр в текущем кадре.
Frame Spacing
Задает интервал между ключевыми кадрами при нажатии кнопки «Add All». Например, значение по умолчанию создает ключевой кадр каждые 15 кадров.
Add All
Щелкните, чтобы установить ключевые кадры по всей последовательности с интервалами, заданными элементом управления FrameSpacing. Например, для последовательности из 30 кадров значение интервала по умолчанию создаст 3 ключевых кадра.
Delete All
Нажмите, чтобы удалить все ключевые кадры в последовательности.
Calculated Accuracy
Отображает точность определения глубины, рассчитанную для текущего кадра при использовании автоматического метода SetKeyframes.
Показатель точности может помочь вам выбрать диапазоны кадров при создании облака точек — кадры с более высокой точностью дают более чистые облака точек.
Dense Tracking
Point Separation
Задает значение разделения в пикселях для точек в плотном облаке точек. Уменьшите разделение, чтобы создать более плотное облако точек, и наоборот.
Track Threshold
Устанавливает пороговое значение корреляции, при котором отслеживание точек прекращается. Использование более высокого порогового значения повышает точность сопоставления точек между ключевыми кадрами.
Track Points
Нажмите, чтобы открыть диалоговое окно выбора диапазона кадров и определить, какие кадры будут использоваться для расчета облака точек. Используйте стандартные обозначения Nuke, например, 1-19, 40-60, 65-100.
Точки также можно добавлять в облако точек поэтапно, выбирая различные диапазоны кадров. Используйте параметр CalculatedAccuracy, чтобы определить наиболее точные кадры для генерации.
Clear Points
Нажмите, чтобы удалить все отслеживаемые точки.
Post Filtering
Display rejected points
При включении этой функции точки, выходящие за пределы пороговых значений угла и плотности, подсвечиваются в 3D-просмотрщике.
При отключении все отклоненные точки удаляются из просмотрщика.
Angle Threshold
Устанавливает пороговое значение минимального угла для триангуляции 3D-точек (в градусах). Точки с большим углом триангуляции более точны. Установите пороговое значение 0, чтобы триангулировать все точки. Увеличьте пороговое значение, чтобы сохранить более точные точки.
Как правило, любое значение меньше 5 градусов, скорее всего, будет неверным.
Density Threshold
Задает пороговое значение минимальной плотности точек. Установите пороговое значение 0, чтобы отобразить все точки, и увеличьте пороговое значение, чтобы выделить отдельные точки.
Delete Rejected Points
Нажмите, чтобы навсегда удалить точки, отклоненные Angle и DensityThresholds.
Совет: Чтобы очистить облако точек, попробуйте включить параметры «Output points per frame» и «Display rejected points». Затем вы можете настроить пороговые значения Filtering и удалять точки на разных кадрах.
Output
Point Size
Задает размер точек, отображаемых в 3D-просмотрщике, в пикселях.
Output points per frame
При включении этой функции в окне просмотра отображаются только точки, созданные в текущем кадре.
При отключении отображаются точки из всех отслеживаемых кадров.
Groups Tab
Display groups in overlay
При включении этой функции цвета групп отображаются в виде наложения в 3D-просмотрщике.
Output visible groups only
При включении этой функции в 3D-просмотрщике отображаются только точки, обозначенные как часть группы на вкладке «Groups».
Вы можете пометить облако точек с помощью групп, чтобы упростить визуализацию различных частей сцены.
Create Group
Щелкните, чтобы добавить текущие выделенные вершины в новую группу. Вы также можете использовать контекстное меню (по щелчку правой кнопкой мыши) в окне просмотра для создания, удаления и изменения групп.
Delete Selected Group
Нажмите, чтобы удалить все выбранные группы и снять выделение с группы в облаке точек.
Для удаления точек используйте режим выбора вершин в 3D-просмотрщике и нажмите клавишу Delete.
Groups
groups
Отображает все группы в облаке точек и позволяет задать имя, цвет и видимость каждой группы.
Для создания групп включите режим выбора вершин в 3D-просмотрщике. Затем вы можете выбрать точки и использовать контекстное меню (по щелчку правой кнопкой мыши) для создания новой группы или добавления выбранных точек в существующую группу.
Bake Selected Groups
Нажмите, чтобы сохранить выбранные группы в отдельном, уже созданном облаке точек.
Bake Selected Groups to Mesh
Нажмите, чтобы преобразовать выбранные группы в сетку с использованием метода реконструкции поверхности Poisson.
Samples
Указывает минимальное количество точек выборки, используемых для расчета точек сетки, с использованием значений с плавающей точкой.
Для облаков точек без шума можно использовать более низкие значения в диапазоне 1,0–5,0. Для более зашумленных точек более высокие значения в диапазоне 15,0–20,0 могут обеспечить более гладкую сетку.
Python Tab
before render
Эти функции выполняются перед началом рендеринга в функции execute(). Если они вызовут исключение, рендеринг будет прерван.
before each frame
Эти функции выполняются перед началом рендеринга каждого отдельного кадра. Если они вызовут исключение, рендеринг будет прерван.
after each frame
Эти функции выполняются после завершения рендеринга каждого кадра. Они не вызываются, если рендеринг прерывается. Если они вызывают исключение, рендеринг прерывается.
after render
Эти функции запускаются после завершения рендеринга всех кадров. Если они выдают ошибку, рендеринг прерывается.
render progress
Эти функции выполняются во время рендеринга для определения хода работы или возникновения ошибки.