В современном мире, где технологии стремительно стирают географические границы, способность управлять тяжелыми беспилотниками через интернет превращается из узкоспециальной компетенции в критически важный стратегический навык. Тяжелые дроны, в отличие своих меньших собратьев, решают масштабные задачи: от мониторинга местности до доставки грузов в закрытые зоны.
Удаленное управление через интернет позволяет развернуть такие операции из любого центра принятия решений, будь то столичный офис или мобильный штаб. Это устраняет необходимость переброски операторов и оборудования к месту выполнения миссии, что экономит не только время, но и значительные ресурсы, а также снижает риски для персонала в опасных регионах.
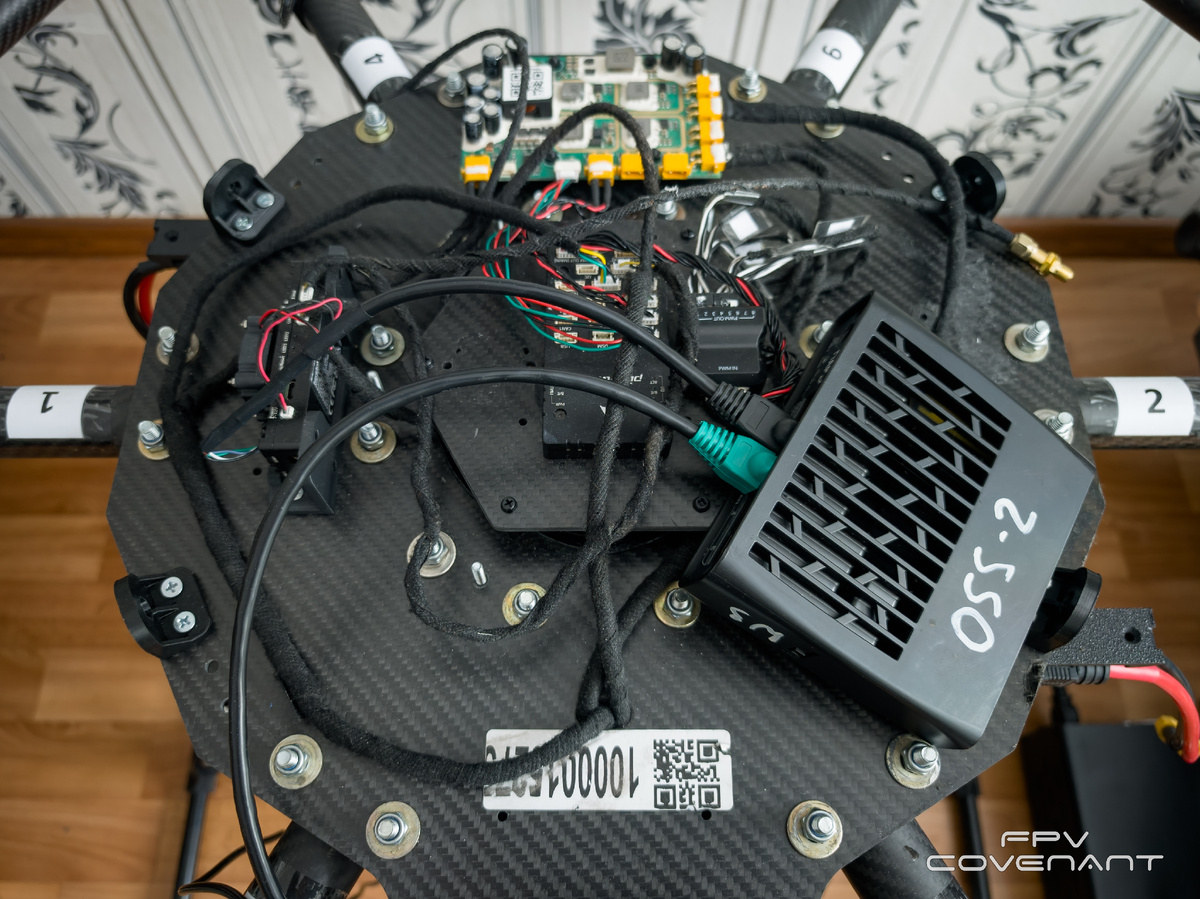
Установка коммутационного оборудования: маршрутизатор Mikrotik
Подготавливая наш гексакоптер к удаленному управлению установим на борт маршрутизатор MIKROTIK HAP AX². Это позволит нам удобно скоммутировать оборудование подключенное через технологию Ethernet.

Сразу же хочется отметить выбор маршрутизатора был обусловлен возможностью установки дополнительных сервисов. Для реализации работы хватит обычного 4 портового коммутатора.
Для тех кто использует маршрутизатор, следует отметить важный момент - устройство должно иметь IP адрес, принадлежащий одной подсети с остальными устройствами гексакоптера (IP камера, Unit Herelink/Siyi).
Подробную настройку маршрутизатора мы расписал тут:
В настройках маршрутизатора мы выставили IP адрес 192.168.144.5
Ранее мы уже определяли, что адреса 192.168.144.10 и 192.168.144.11 - принадлежат воздушному и наземному юниту Herelink. 192.168.144.108 - привычно устанавливается для камеры. Адреса для модуля Astra и рабочей станции будут выдаваться динамически из заранее заданного диапазона.
Сразу же и подключаем ранее установленные устройства (камера, радиомодуль) в свободные порты маршрутизатора.
Есть одна важна особенность на которую стоит обращать внимание при работе с сетевым оборудованием. Некоторые устройства имеют обозначение POE - это значит что по сетевым проводам передается напряжение, которое может спалить подключенное оборудование.
Ряд моделей маршрутизаторов поддерживает Wi-Fi соединение. Лишнее радиоизлучение на нашей сборке нам не нужно, его требуется отключить в настройках.
Для проверки работоспособности оборудования, подаем питание на дрон и подключаем по сетевому кабелю рабочую станцию в свободный порт.
Мы уже неоднократно рассказывали, что удобно использовать программу для сканирования сети Advanced IP Scanner.
Вводим скандируемый диапазон и видим устройства находящиеся в сети.
Все работоспособно. Настало время установить модуль удаленного управления Astra.
Модуль системы удаленного управления Astra: установка на раме дрона
Исходя и того, что часто корпуса тяжелых дронов часто имеют токопроводящие материалы, сделаем простейшую модель для монтажа микрокомпьютера Luckfox Pico Ultra W на раме.
Модель для самостоятельной печати можно скачать по ссылке.
С помощью двухсторонего скотча или пары капель суперклея установим площадку на раме в удобном месте.
На данном этапе монтаж оборудования на дроне окончен. Нам предстоит обновить прошивку микрокомпьютера, подключить и настроить удаленное управление.
Модуль системы удаленного управления Astra: прошивка и настройка
Для начала нам потребуется перепрошить наш микрокомпьютер Luckfox Pico Ultra W.
Для этого скачиваем программу SocToolKit и отдельно драйвер для Windows. Так же нам потребуется сразу же скачать актуальную версию самой прошивки.
Заранее устанавливаем драйвер на рабочий компьютер.
Далее подключаем компьютер к модулю Luckfox Pico Ultra с помощью USB Type-C кабеля из комплекта. Переведим устройство в режим прошивки: Зажимаем кнопку Reset. Не отпуская Reset, зажмите кнопку Boot. Отпускаем Reset, затем отпускаем Boot.
Открываем скачанную программу SocToolKit.exe и выбираем чип RV1106.
В левом верхнем углу выбираем интерфейс USB. В выпадающем списке появится устройство с меткой "Maskrom..." — выбираем его.
Нажимаем кнопку Firmware... и выбираем файл прошивки ХХХХХХХ.img.
Теперь после нажатия кнопки Upgrade требуется дождаться окончания прошивки и отключить питание устройства.
Прошивка устройства закончена.
Переходим в личный кабинет системы связи "Астра" и проходим регистрацию.
После мы получим на личный e-mail уникальный ключ.
Предположим, что мы были уже ранее зарегистрированы в системе, но наш предыдущий модуль сгорел. У нас есть возможность его отвязать от системы не чаще одного раза в месяц и привязать новый модуль.
Входим в систему с нашими регистрационными данными.
Выбираем наш ранее зарегистрированный модуль и в настройках выбираем функцию - Отвязать.
Мы получим сообщение с ключом для привязки нового устройства, который требуется сохранить.
Далее подключаем модуль Luckfox Pico Ultra к интернету по Ethernet интерфейсу и подаем питание.
Микрокомпьютер создаст точку доступа Wi-Fi с названием: Astra-AP и паролем: astracsky. Подключаемся!
После подключения откроется страница с настройками, если этого не произошло автоматически, то откройте в браузере адрес: http://192.168.4.1
Вводим ключ активации, а также email и пароль от сервиса.
После успешной активации откроются настройки.
Тут стоит обратить внимание на подключение камеры. Если мы используем карту захвата видеоизображения (Easycap) и аналоговую камеру, то выставляем USB, если мы используем цифровую камеру через интерфейс CSI, то его и требуется выбрать.
Мы в этот раз будем подключать IP камеру и поэтому нам требуется вписать правильный поток камеры, исходя из настроек.
Сохраняемся.
На этом этапе первоначальные настройки окончены. Теперь нам требуется подключить микрокомпьютер к полетному контролеру Pixhawk6C и подать питание.
Модуль системы удаленного управления Astra: подключение к полетному контроллеру Pixhawk6C
Для начала нам потребуется спаять два провода - один для подключения питания и провод для подключения к полетному контроллеру.
Удобнее всего использовать силиконовые провода марки awg и уже готовые разъемы.
Так как на нашем полетном контроллере разъемы Telem 1 и Telem2 уже заняты, мы будем использовать разъем Telem3.
После подключения проводов подключаемся к полетному контроллеру с помощью компьютера через USB Type-C.
Загружаем Mission Planner. Нам требуется подключиться к полетному контроллеру и перейти в Full Parameter List.
Так как нашему разъему Telem3 соответствует Serial5, то выбираем его в дереве. Устанавливаем скорость Serial5_Baud 115 и Serial5_Protocol на MavLink2. Незабываем сохраянять параметры Write Params.
Далее в RC_OPTIONS требуется снять флаг ignore MAVLink Overrides если он используется. Незабываем сохраянять параметры Write Params.
И RC_OVERRIDE_TIME устанавливаем 1-3 секунды (время через которое после потери сигнала автопилот переключится на обычную связь или сработает failsafe). В нашем случае произойдет переключение на Herelink.
На этом настройки окончены.
Подключаем питание к нашему дрону.
Для пробного теста с интернетом подключим 4G роутер Tandem.
Наш маршрутизатор получает интернет и раздает его всем устройствам в сети.
Проверим работоспособность камеры и подключимся по Wi-Fi к модулю Astra.
Мы видим доступность сети интернет. Наш модуль Astra получает интернет и успешно получает доступ к серверу. Изображение с камеры доступно. Значит все настройки произведены верно.
Так как у нас нет пока пульта управления Herelink мы подключимся к дрону через наземную станцию управления. Как ее собрать своими руками мы рассказывали тут:
Попробуем просканировать сеть и посмотреть доступное оборудование.
Мы видим что в нашей сети все устройства доступны, настройки произведены верно.
Попробуем загрузить снова личный кабинет системы связи "Астра" и проходим в режим FPV.
Мы получаем телеметрию с полетного контроллера и изображение с камеры. Мы можем подключить пульт управления по USB и прямо в браузере проводить удаленное управление дроном.
Осталось установить Starlink. К полетам через интернет готовы!
Как мы видим, все вышесказанное делает роль оператора не просто "пилота", а специалиста широкого профиля. Он должен не только виртуозно управлять машиной через интерфейс, но и понимать основы сетевых технологий, уметь действовать в условиях нестабильной связи и анализировать большой поток телеметрии.
Умение работать с тяжелыми дронами удаленно — это синтез навыков пилотирования, дистанционного мониторинга и кибербезопасности, что открывает новые горизонты для развития многих отраслей в эпоху цифровой трансформации.