Если вы когда-нибудь видели видео с роботом, который спотыкается, падает или идёт странной «деревянной» походкой, возникает логичный вопрос:
Почему в 2026 году, при нейросетях и GPU, роботы всё ещё плохо ходят?
Мы уже умеем:
— распознавать лица лучше человека
— писать код
— управлять беспилотникам
Но просто ходить по полу, как ребёнок, — для робота всё ещё сложная задача.
Разберёмся почему.
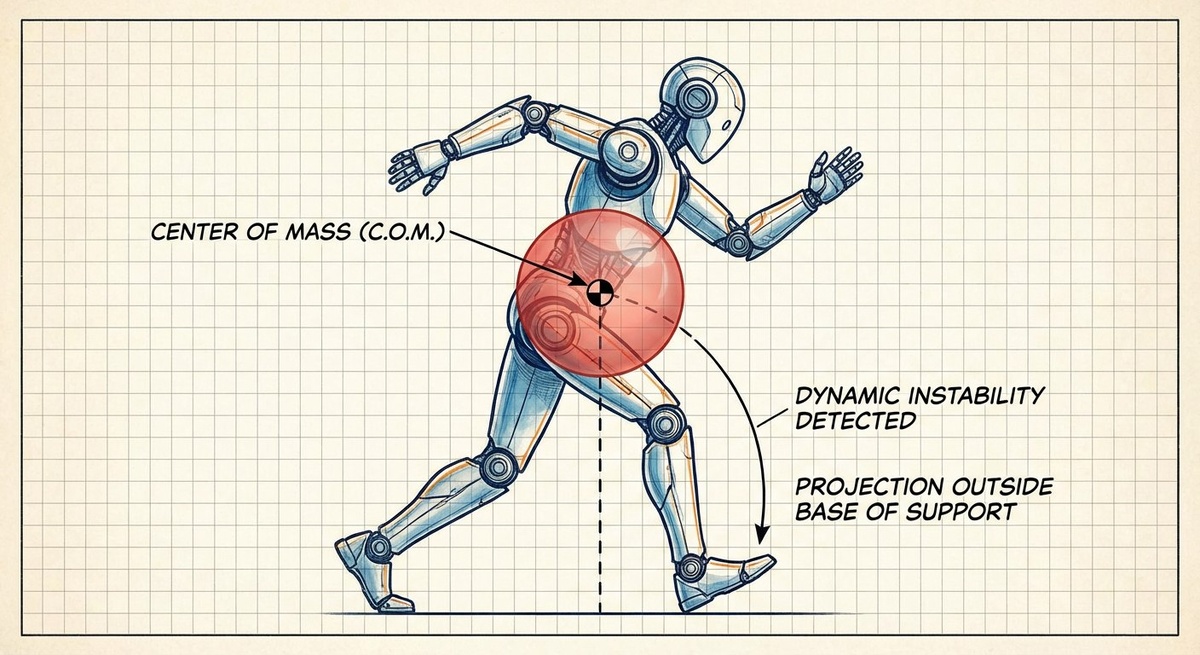
Проблема №1. Ходьба — это не движение, а баланс
Человеческая ходьба кажется простой только со стороны. На самом деле это непрерывное падение, которое мы каждую миллисекунду незаметно для себя корректируем.
Человек чувствует давление в стопах, мгновенно реагирует на микроскольжение и автоматически компенсирует наклон корпусом и руками, даже не осознавая этих действий.
Робот же устроен иначе.
Он получает данные с задержкой, действует через математические модели, а не инстинкты, и не «чувствует» собственное тело — он лишь вычисляет его состояние.
Проблема №2. Симуляция врёт
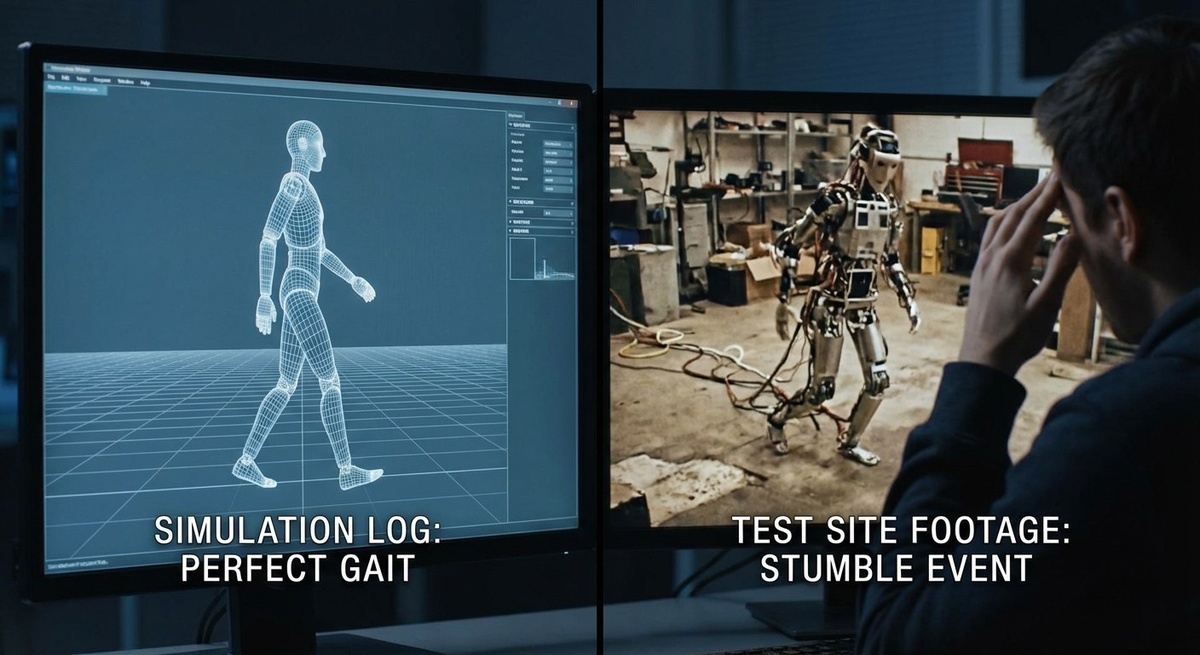
Большинство роботов учатся ходить не в реальном мире, а в симуляторах. Это кажется логичным решением: так безопаснее, дешевле и быстрее проводить эксперименты.
Но есть важный нюанс — симуляция почти всегда врёт.
Она плохо передаёт трение настоящего пола, не учитывает микровибрации конструкции, люфты в редукторах и реальные задержки сенсоров. В результате движения, которые выглядят идеально в виртуальной среде, начинают рассыпаться при первом же выходе в реальность.
Этот разрыв между виртуальным и настоящим миром.
Проблема №3. Мир слишком разнообразен
Человеку, по большому счёту, всё равно, по какой поверхности идти — по плитке, ковру, лестнице или гравию. Мы автоматически подстраиваемся под условия, почти не задумываясь о том, что происходит под ногами.
Для робота ситуация совсем другая.
Каждая новая поверхность для него — отдельная задача. Любая неровность превращается в потенциальную ошибку, а каждая ступенька требует собственного сценария движения и управления.
Ходьба по ровному полу, по лестнице, по улице или с грузом в руках — это принципиально разные режимы. Одна универсальная политика управления просто не способна надёжно покрыть всё это разнообразие.
Проблема №4. У робота нет «тела», как у человека
Человек с детства учится чувствовать вес собственного тела, предсказывать инерцию движений и заранее компенсировать смещение баланса. Эти навыки формируются неосознанно, через опыт и постоянное взаимодействие с физическим миром.
Робот этого не знает.
Он не понимает, что в следующий момент может потерять равновесие, что стоит перенести вес на другую ногу или что движение нужно замедлить, чтобы не упасть.
Он действует по формулам и обученным политикам, не обладая внутренней моделью собственного тела.
Это ключевая проблема.
Проблема №5. Мы долго учили роботов неправильно
Исторически робототехника развивалась по пути жёстких контроллеров, заранее прописанных траекторий и ручной настройки параметров. Такой подход хорошо работает в лабораторных условиях, где мир предсказуем и ограничен.
Но в реальном мире эта логика быстро ломается.
Только в последние годы стало по-настоящему понятно: робота невозможно просто «запрограммировать ходить». Его нужно именно научить.
Через обучение с подкреплением, миллионы попыток, неизбежные падения и постепенную адаптацию к среде.
Почти так же, как учится ходить ребёнок.
Почему прогресс всё же есть
Несмотря на проблемы, ситуация быстро меняется.
Сейчас появляются подходы, основанные на обучении на реальных данных, доменной рандомизации, использовании world models и прямом обучении через контакт с физическим миром.
Благодаря этому роботы начинают падать реже, учатся восстанавливаться после потери равновесия и всё лучше адаптируются к ситуации на лету.
Мы находимся не в конце этого пути, а только в его начале.
Главное
Роботы плохо ходят не потому, что инженеры «не умеют».
Причина в другом. Ходьба — одна из самых сложных задач в физическом мире. В ней одновременно сходятся тело, баланс и среда, образуя крайне нестабильную и чувствительную систему. Человек решает эту задачу бессознательно, опираясь на ощущение собственного тела, тогда как робот вынужден проходить тот же путь через вычисления.
Но прогресс уже необратим.
Следующий качественный скачок произойдёт тогда, когда робот начнёт понимать своё тело, а не просто управлять моторами.
#роботы #ии #physicalai #технологии