
Японские инженеры создали четвероногого робота, который анатомически точно воспроизводит строение тела собаки. Вместо электромоторов в нем используются гибкие пневматические искусственные мышцы Маккиббена, которые позволяют имитировать естественные движения животного. Особое внимание разработчики уделили воспроизведению мышечной структуры плечевого пояса собак, у которых лопатки крепятся к туловищу только за счет мышечной ткани, без суставов. Прототип успешно продемонстрировал стабильную ходьбу по прямой. Статья опубликована в журнале Advanced Robotics Research.
Большинство современных четвероногих роботов, таких как Spot от Boston Dynamics, используют в роли приводов расположенные в плечевых суставах электромоторы. Это решение позволило достичь значительных успехов: робособаки научились выполнять сложные акробатические трюки и прыжки, передвигаться по труднопроходимому рельефу и взбираться по вертикальным лестницам. Однако существует еще один подход — разработка роботов, конструкция которых имитирует систему мышц, сухожилий и связок биологических прототипов.
Один из способов реализовать это в «железе» — использовать искусственные мышцы на основе актуаторов Маккибена. Они состоят из внешней плохо растягиваемой плетеной оболочки, внутри которой находится эластичная герметичная трубка. При подаче давления воздуха или жидкости трубка надувается и увеличивается в ширину, но из-за того, что внешняя оболочка практически не растягивается, весь актуатор сокращается в длину, имитируя работу реальной мышцы.
Актуаторы такого типа выбрали инженеры под руководством Коичи Судзумори (Koichi Suzumori) из Токийского научного института, чтобы детально воспроизвести опорно-двигательный аппарат собаки. За основу они взяли модель скелета собаки среднего размера, а в роли мышечных волокон использовали множество тонких (2–4 миллиметра) пневматических актуаторов Маккиббена. Всего в конструкции использовано 48 мышц, по 15 штук на передние лапы и по 9 — на задние.
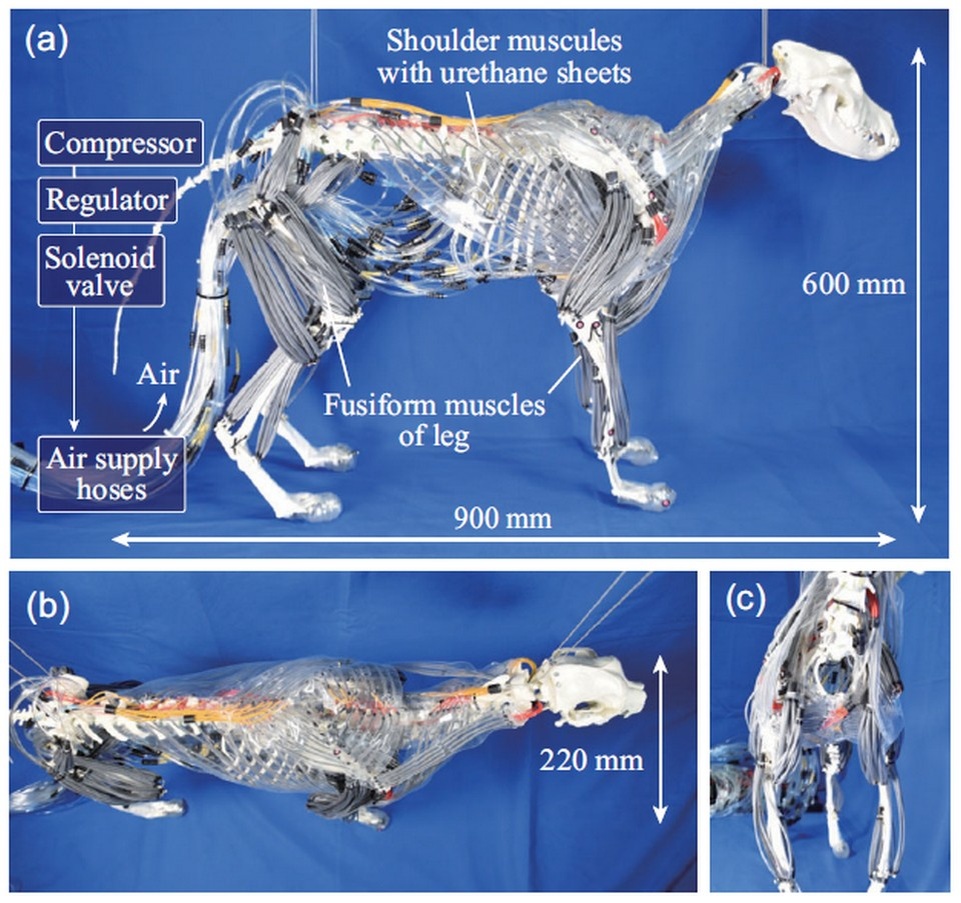
Передние конечности прикреплены к туловищу только с помощью мышц, а не суставов (такой вид соединения костей называется синсаркоз), как и у настоящих собак. Лопатки скелета удерживается с помощью актуаторов, имитирующих трапециевидные, ромбовидные и зубчатые мышцы. По мнению разработчиков, эта мышечная «подвеска» играет существенную роль в процессе движения, увеличивая длину шага и подвижность. Для воссоздания геометрии широких плоских мышц плечевого пояса инженеры объединили несколько актуаторов в слоистые структуры с помощью полиуретановой подложки.
Из-за отсутствия системы поддержания равновесия и пассивных стабилизирующих тканей, таких как суставные сумки и связки, робот пока не может самостоятельно удерживать свой вес. Поэтому во время движения он вынужден опираться на вспомогательную алюминиевую тележку с колесами, не мешающую при этом движениям ног. Алгоритм их перемещений имитирует паттерн собачьей походки.
Результаты испытаний показали, что мускульно-скелетный робот способен успешно передвигаться, используя ту же последовательность активации мышц, что и у реальных животных. При этом амплитуда движений ног оказалась меньше реальной из-за механических пределов сокращения искусственных мышц Маккибена, которым требуется предварительное растяжение. Тем не менее, прототип подтвердил, что воспроизведение реальной мышечной архитектуры позволяет роботу совершать движения, близкие к естественным. Помимо робототехники, в будущем это может помочь в исследованиях двигательных возможностей реальных животных.
Авторы планируют сосредоточиться на реализации ходьбы без тележки. Для этого потребуется воспроизвести недостающие структуры суставов, хрящи, суставные сумки, фасции и кожу. Кроме того, инженеры хотят оптимизировать пневматическую систему, в частности, укоротить трубки подачи воздуха от насоса, чтобы повысить скорость реакции искусственных мышц. Это потребуется для воссоздания более стремительной походки.
Польский стартап Clone недавно анонсировал разработку полноразмерного мускульно-скелетного робота-андроида Clone Alpha. Строение тела робота будет повторять анатомию человека, а в качестве мышц будут использоваться пучки гидравлических актуаторов Маккибена.