Введение: Охота в кромешной тьме
Представьте: глубина 150 метров. Температура воды близка к нулю. Видимость — ноль. Толща ила и взвеси поглощает свет фонарей уже в метре от объектива. Именно в таких условиях покоятся большинство затонувших кораблей — как недавних, так и древних. Человек-водолаз здесь почти беспомощен. На смену ему пришел новый тип исследователя: автономный подводный аппарат (АНПА), вооруженный «зрением» сонаров и «интеллектом» искусственных нейронных сетей. Как же эта связка технологий позволяет находить иголку в стоге сена на дне океана?

Глава 1: Глаза, видящие звуком. Эхо вместо света
В мутной воде электромагнитные волны (свет, радиоволны) бессильны. Единственный эффективный способ «видеть» — это акустика. Подводные роботы оснащаются целым арсеналом сонаров (гидролокаторов):
- Боковые панорамные сонары (Side-scan sonar).
Принцип: Аппарат буксирует за собой или несет на корпусе «гантели», излучающие веер звуковых импульсов в стороны. Сигнал, отразившийся от дна и объектов на нем, формирует детализированную акустическую тень.
Что видно: По характеру тени (четкая, размытая, двойная) и яркости отражения опытный оператор или ИИ может отличить камень от якоря, песчаную волну от деревянного борта. Это поисковый «широкоугольник», способный за час «прощупать» полосу дна шириной в сотни метров. - Многолучевые эхолоты (Multibeam echosounder).
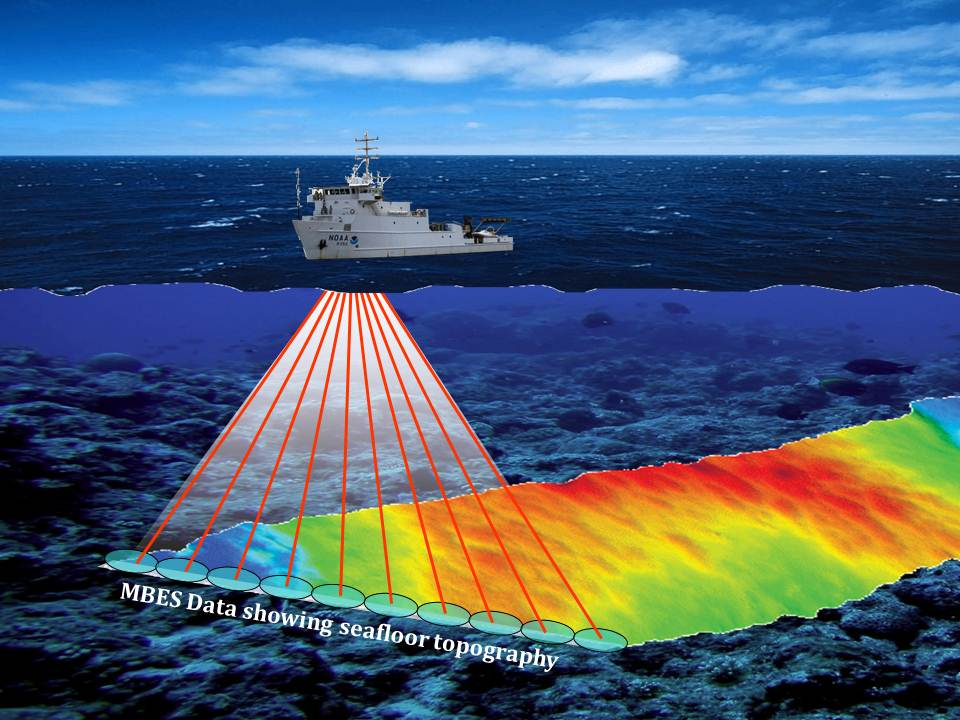
Принцип: Создает не полосовую, а точечную 3D-карту рельефа дна с сантиметровой точностью. Излучает веер лучей строго под собой.
Что видно: Мельчайшие аномалии рельефа — очертания засыпанного илом корабля, характерный провал от разломившегося корпуса, груду балластных камней. Это инструмент для детальной съемки и картографирования.
3.Сонары суб-боттомного профилирования (Sub-bottom profiler).
Принцип: Использует низкочастотные звуковые волны, способные проникать в грунт на несколько метров.
Что видно: Объекты, полностью погребенные под илом и песком. Это ключевой инструмент для поиска древних судов, исчезнувших с поверхности дна тысячелетия назад.
Глава 2: Мозг, который учится на тенях. Как ИИ превращает шум в корабль
Полученные терабайты сырых акустических данных — это хаос из теней, помех, геологических образований и артефактов. Вот где в игру вступает ИИ.
- Этап 1: Обучение на «фотороботах» прошлого.
В нейросеть загружают тысячи примеров: это корабль, а это — скала. Учат распознавать ключевые паттерны: симметрию киля, геометрию шпангоутов (ребер корпуса), характерный силуэт пушек или котлов. - Этап 2: Автоматическое целеуказание (Automatic Target Recognition - ATR).
Обученный алгоритм проползает» по данным бокового сканирования, отмечая все объекты с признаками антропогенного происхождения. Он отсекает 95% мусора (камни, стаи рыб, неровности дна), оставляя оператору-человеку лишь короткий список самых перспективных аномалий. Это сокращает время анализа с недель до часов. - Этап 3: 3D-реконструкция и классификация.
Для объектов, попавших в список целей, робот проводит детальную съемку многолучевым эхолотом. ИИ на основе облака точек строит трехмерную модель даже сильно разрушенного судна.
Сравнивая ее с базой данных, система может предложить: «Это, с вероятностью 87%, торговое судно XVIII века с характерными пропорциями и расположением мачт».
Глава 3: Автономный охотник. Робот, который принимает решения
Современные АНПА — не просто камеры на тросе. Это автономные исследователи.
- По заданному квадрату они сами строят маршрут, обходя препятствия.
- Обнаружив интересный объект, могут автономно снизиться и провести его детальную съемку с разных ракурсов, не дожидаясь команд с судна.
- Синхронизация данных: Робот в реальном времени совмещает данные GPS (когда всплывает), инерциальной навигации, доплеровского лага (скорости относительно дна) и сонаров, чтобы точно привязать каждую находку к географическим координатам.
Глава 4: Пример в действии. Как нашли «судно из меди»?
Классический пример — обнаружение британского парусника «Медный корабль» (Copper Ship), затонувшего в Балтийском море в XVII веке. Его нашел финский робот «Альго»:
- Сначала многолучевой эхолот выявил аномалию, похожую на судно, на глубине 130 м.
- К месту отправили АНПА с высокочувствительным боковым сонаром. Полученное изображение было настолько четким, что ИИ и операторы сразу идентифицировали очертания корпуса и пушек.
- Последующие погружения с фото- и видеоаппаратурой (в прозрачной воде Балтики) подтвердили: это прекрасно сохранившийся корабль, трюмы которого были полны медных слитков.
Заключение: Тихая революция на дне
Подводная археология переживает технологический переворот. Сонары — это новые глаза археолога, а ИИ — его когнитивный двойник, неутомимо фильтрующий информацию. Это позволяет:
- Сводить к нулю риск для человека.
- Исследовать недоступные ранее глубины.
- Работать в условиях нулевой видимости.
- Находить объекты, невидимые глазу, скрытые под слоями осадков.
Робот-археолог не заменяет историка. Он делает за него самую опасную, рутинную и масштабную часть работы — просеивает океанские просторы, оставляя ученым самое ценное: координаты, 3D-модели и возможность виртуально поднять артефакт на поверхность для изучения, не потревожив его хрупкий покой.
Как вы думаете, сможет ли ИИ в будущем не только находить, но и полностью виртуально реконструировать утраченный облик корабля и даже его последние мгновения? Или машина всегда будет лишь инструментом в руках человеческой интуиции?