Что такое Action в ROS2 (и зачем он нужен)
После нод, топиков и сервисов у нас появляется ещё один важный инструмент — Action.
Action — это механизм ROS2 для длительных задач, которые нельзя выполнить мгновенно.
Например:
🗺 движение к цели
🤖 управление манипулятором
📈 сложные вычисления
🚗 перемещение по маршруту
Почему топиков уже недостаточно?
👉 топик = поток данных, без статуса выполнения
👉 сервис = разовый запрос, но без прогресса
👉 action = цель + прогресс + результат + возможность отмены
Это будто «миссия» для робота:
он получает goal, сообщает feedback, а потом присылает result.
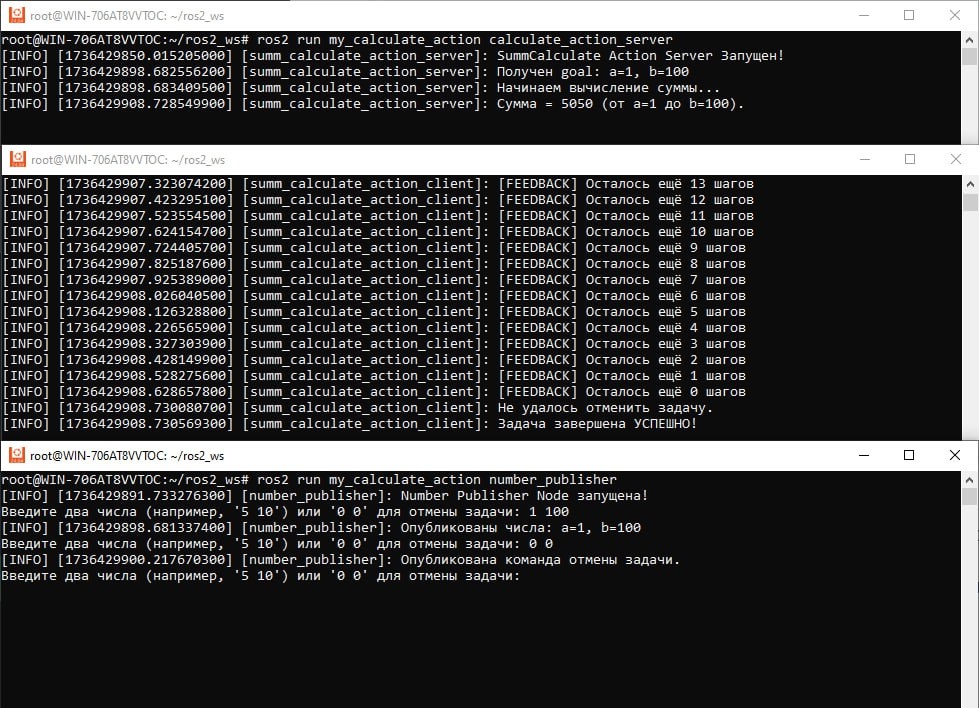
В уроке мы начинаем с простого примера — суммирования чисел от A до B,
но цель — показать механику:
goal — диапазон
feedback — сколько шагов осталось
result — успешно или нет
Дальше — переносим эти навыки на робота!
👇 Урок здесь
https://stepik.org/lesson/1505348/step/1?unit=1525494