Как Action помогает роботу ехать к цели Мы уже управляли черепахой через топики /pose и /cmd_vel. Но у этой схемы были минусы: ❌ нет прогресса: насколько она близко к цели? ❌ нельзя отменить задачу ❌ нельзя послать новую цель, пока старая не завершена Action решает всё это сразу: ✨ отправили роботу goal → он начал движение ✨ каждые 100 мс робот даёт feedback: «осталось 63% пути» ✨ можно в любой момент cancel ✨ можно отправлять новые цели В уроке мы аккуратно разбираем это на примере вычислений, а дальше уже перейдём к движению реального робота к координате, точно как в навигации и настоящих робосоревнованиях! 👇 Урок здесь https://stepik.org/lesson/1505348/step/13?unit=1525494
Как Action помогает роботу ехать к цели
Мы уже управляли черепахой через топики /pose и /cmd_vel.
Но у этой схемы были минусы:
❌ нет прогресса: насколько она близко к цели?
❌ нельзя отменить задачу
❌ нельзя послать новую цель, пока старая не завершена
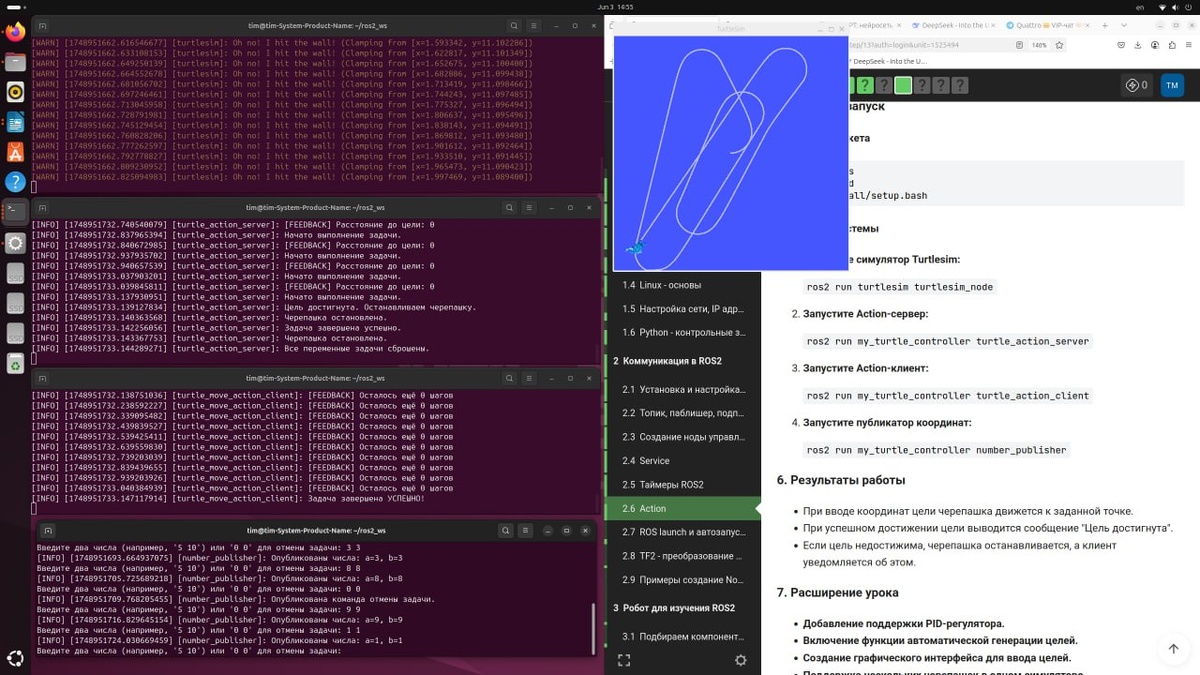
Action решает всё это сразу:
✨ отправили роботу goal → он начал движение
✨ каждые 100 мс робот даёт feedback: «осталось 63% пути»
✨ можно в любой момент cancel
✨ можно отправлять новые цели
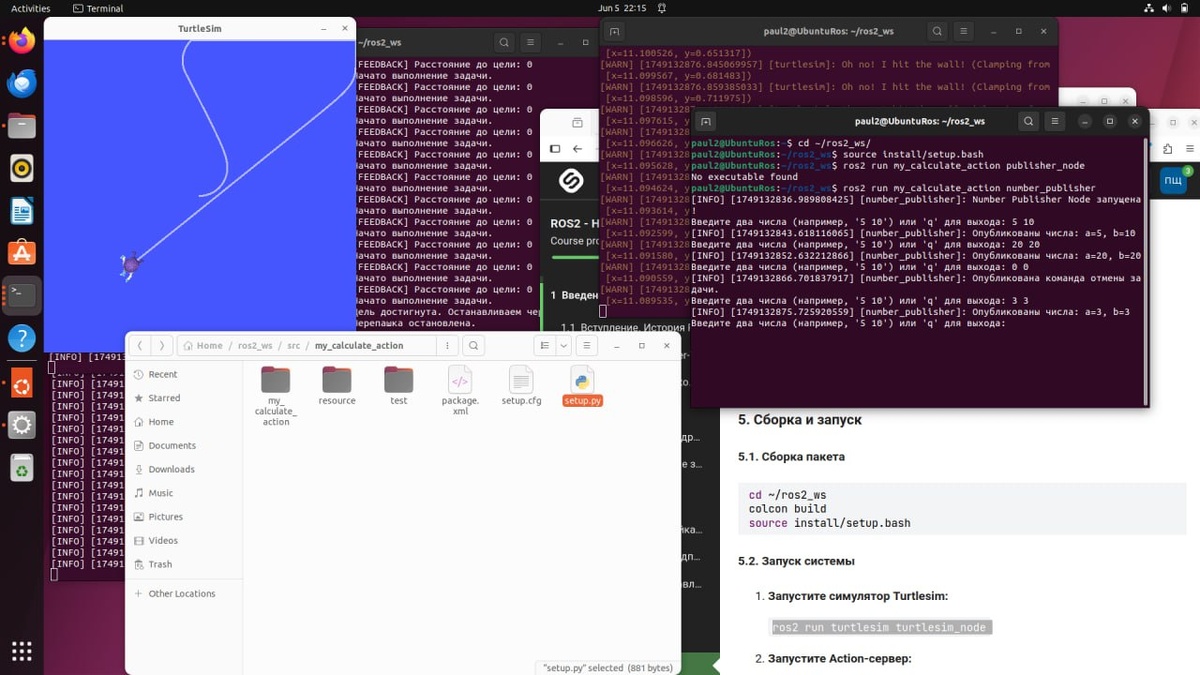
В уроке мы аккуратно разбираем это на примере вычислений,
а дальше уже перейдём к движению реального робота к координате,
точно как в навигации и настоящих робосоревнованиях!
👇 Урок здесь
https://stepik.org/lesson/1505348/step/13?unit=1525494