🧩 Переходим к основам ROS2!
Вчерашний опрос показал, что все отлично усвоили, какую версию ставим 😎
Мы работаем с ROS2 Jazzy.
👉 Официально он ставится на Ubuntu 24.04 или Windows 10.
💡 На Windows 11 у меня установить не получилось — если у вас вышло, обязательно напишите, расскажите, как победили!
🤖 А теперь — к базовым понятиям ROS2
Чтобы понимать, что мы вообще устанавливаем, нужно разобраться: как программы общаются внутри ROS2?
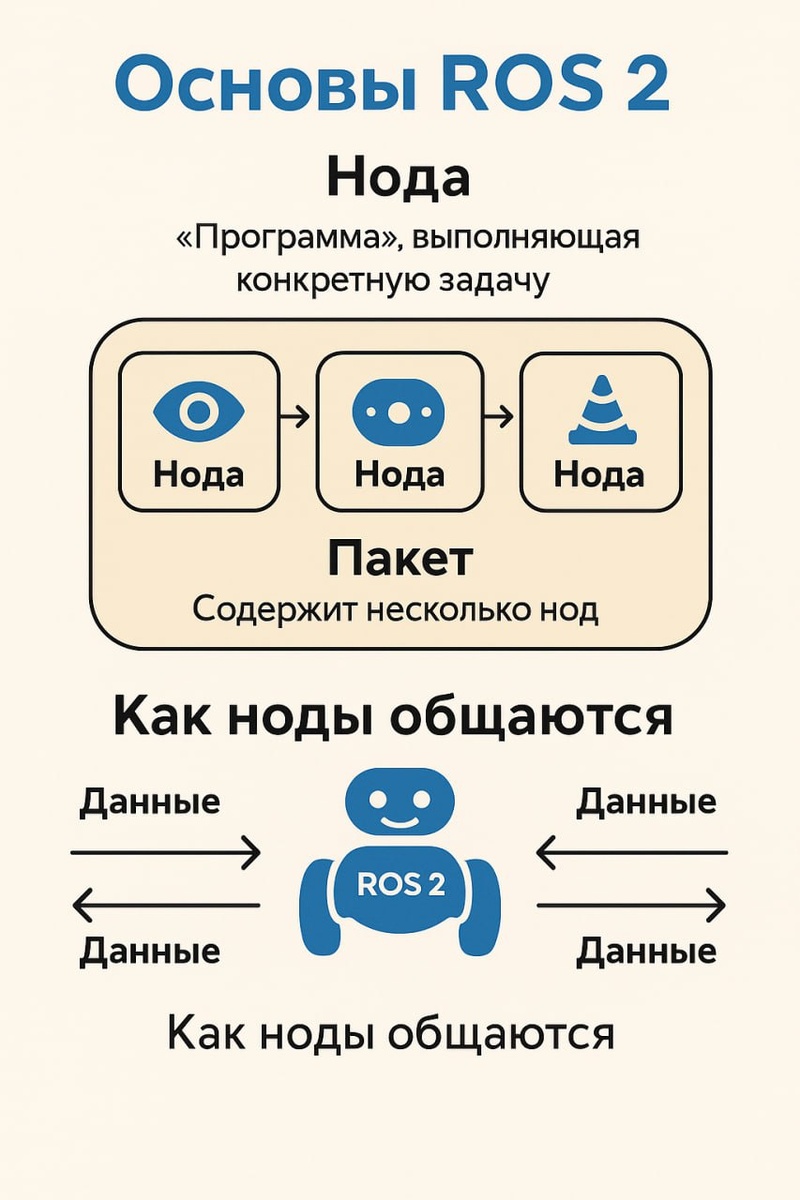
🔹 Нода (Node)
Это «маленькая программа», которая делает одну конкретную задачу.
Например: читает данные камеры, управляет мотором, анализирует лазерный дальномер.
🔹 Пакет (Package)
Это «папка проекта», где может лежать несколько нод, конфиги, файлы запуска и т.д.
Пакет = логически объединённая функциональность.
🔹 Как ноды общаются?
Вот здесь и начинается магия ROS2 ✨
Ноды могут обмениваться данными без того, чтобы знать друг о друге детали реализации.
Разработчики просто договариваются:
какие данные нода отдаёт (публикует сообщения),
какие данные нода принимает (подписывается на сообщения).
После этого каждая нода спокойно выполняет свою работу — и система начинает оживать как настоящий робот 🤝🤖