
Нештатная ситуация или типичный городской сценарий?
//Мы разберем, почему «зрение» робота бессильно перед снегопадом, как «городские каньоны» мешают GPS, и почему успех проекта зависит не столько от программистов, сколько от «умных» светофоров, выделенных полос и новой городской политики
Полдень. Трамвай плавно катится по проспекту. В салоне тихо, пассажиры дремлют или смотрят в окна. Вагон ведет автопилот. Вдруг в 15 метрах впереди из-за припаркованного фургона на рельсы выскакивает курьер на велосипеде, глядя в смартфон. Он не смотрит на дорогу. Одновременно с этим справа автомобиль, игнорируя знаки, решает «проскочить» и повернуть налево прямо перед носом вагона. В штатной ситуации трамвай издал бы пронзительный звонок и встал как вкопанный, а пассажиров швырнуло бы вперед от экстренного торможения. Водитель-человек, скорее всего, успел бы среагировать, применив экстренное торможение. А успел бы робот? И какой ценой для тех, кто в салоне? Этот мысленный эксперимент — не страшилка, а ежедневная реальность, которая отделяет нас от будущего городских беспилотников.
От автоматизации к подлинной автономии
//В чем фундаментальный скачок сложности?
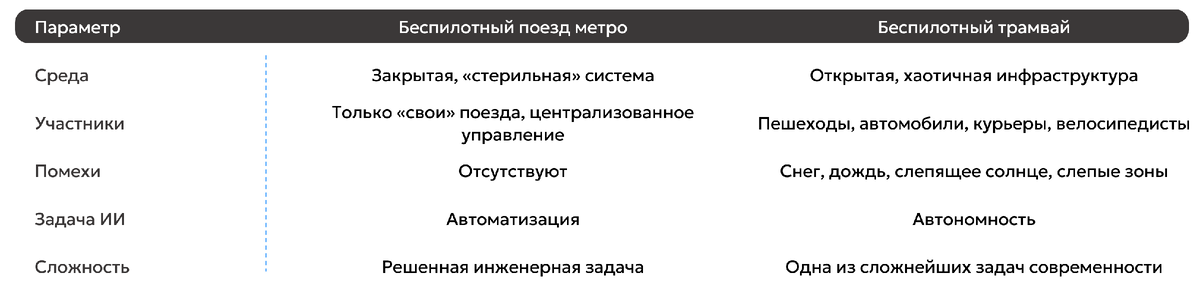
Многие горожане справедливо задаются вопросом: если поезда в метро во многих городах мира (например, в Париже, Нюрнберге или Чикаго) уже десятилетиями ездят без машиниста, почему мы до сих пор не видим того же самого на улицах?
Ответ кроется в главной разнице между двумя средами. Метро — это закрытая система. Это стерильный, предсказуемый мир. В тоннеле нет пешеходов, велосипедистов, курьеров, припаркованных машин и, самое главное, нет снега, дождя или слепящего солнца. Все поезда на линии — «свои», они движутся по одним правилам и управляются централизованно. Задача автопилота в метро — следовать жесткому, заранее заданному алгоритму в лабораторных условиях: ехать от станции А до станции Б и вовремя тормозить. Это автоматизация.
Трамвай, напротив, живет в открытой инфраструктуре. Это хаотичные городские джунгли. Как показывают исследования, проведенные при тестировании прототипов в Потсдаме, автономное управление в такой среде требует совершенно иных технологий. В отличие от метро, где умная инфраструктура, а поезд является исполнителем, зрелую городскую среду кардинально не изменишь.
Поэтому вся технология, весь «мозг» должен быть установлен в самом трамвае. Человек-водитель, которого мы хотим заменить, — это суперкомпьютер. Исследователи подсчитали, что он выполняет как минимум 25 различных задач, причем многие из них одновременно. Он должен:
🔵 Реагировать на автомобили, пешеходов и другие трамваи.
🔵 Поддерживать скорость и расписание в любых погодных условиях.
🔵 Точно останавливаться на остановках и светофорах.
🔵 Координировать пересадки.
🔵 Быстро и адекватно реагировать на любые нештатные проблемы.
Автопилот в метро автоматизирован — он следует скрипту. Автопилот в трамвае должен быть автономным — он должен самостоятельно и интеллектуально функционировать в сложной среде, принимая решения в ситуациях, которые невозможно предсказать. Это огромный технологический скачок. И вот почему он так сложен.
Четыре технологических барьеров на пути к полной автономии
//Что я вижу в плохую погоду и при помехах?
Чтобы автопилот мог заменить человека, он должен научиться справляться с четырьмя фундаментальными проблемами, с которыми не сталкивается поезд в метро.
Проблема зрения
У робота-трамвая есть несколько типов сенсоров — это его «глаза» и «уши». Он использует технологию фьюжн данных от них, чтобы построить картину мира.
Камеры: как наши собственные глаза, распознают цвета, дорожные знаки, разметку и помогают искусственному интеллекту идентифицировать объекты.
Лидары: ощупывают мир импульсами лазера, создавая точное трехмерное облако точек. Это глаза, которые измеряют дистанцию до сантиметров.
На бумаге это звучит надежно. На практике — все эти сенсоры несовершенны и боятся плохой погоды. Камеры слепнут. Их ослепляет солнце, они плохо видят в темноте. В дождь падающие капли превращаются в полосы, создавая сильный визуальный шум. В сильный снег или туман теряется контраст — все становится белым. Лидары — самые точные, но и самые уязвимые. Лазерный луч лидара рассеивается и поглощается каплями дождя, тумана и, что особенно критично, снежинками. Исследования показывают, что сильный дождь может снизить дальность зрения лидара на 30%. Снег и вовсе создает ложные возвраты: роботу кажется, что прямо перед ним стена, хотя это просто плотный снегопад.
И тут в дело вступают уши
Радары: это, по сути, уши трамвая. Как эхолокация, они слышат сквозь дождь, снег и туман, сквозь которые камеры и лидары беспомощно слепнут. Но этот слух не дает четкой картинки. Радар отлично сканирует, что в 100 метрах есть объект и он движется, но не видит деталей: это машина или оторвавшийся рекламный щит?
Так называемый сенсорный фьюжн — это не волшебство, а сплав высокоточного зрения, посредствам лидаров и камер, и всепогодного, но неточного слуха посредствам радара. Это управление компромиссом.
В солнечный день трамвай видит мир в высоком разрешении. В метель его зрение принудительно деградирует до уровня слуха. Это означает, что система вынуждена немедленно переходить в специальный режим деградации, например, резко снижать скорость до 5-10 км/ч, потому что она ослепла и больше не может надежно классифицировать угрозы.
Проблема слепых зон
Для автопилота самая большая опасность — не та, что он видит, а та, которую он не видит.
Во-первых, это окклюзия — технический термин для слепых зон, созданных другими объектами. Это главная головная боль для трамвая, который не может объехать препятствие. Из-за припаркованного у обочины грузовика или ряда машин на дорогу в любой момент может выбежать пешеход или выкатиться мяч, за которым побежит ребенок. Автопилот должен не просто сканировать видимое пространство, но и постоянно моделировать потенциальные угрозы из невидимых зон.
Во-вторых, это «городские каньоны» — улицы с плотной, высокой застройкой. В таких местах пропадает или катастрофически искажается сигнал GPS. Высокие здания вызывают эффект мультипути: сигнал отражается от стен, и приемник получает несколько версий сигнала с разной задержкой. Результат? Точность GPS падает до 5, 30 или даже 100 метров. Если беспилотный автомобиль с погрешностью в 5 метров все еще понимает, что он на дороге, то для трамвая на рельсах шириной ~1.5 метра такая ошибка фатальна. Именно поэтому автономный трамвай не может полагаться на GPS.
Он вынужден использовать более сложные методы: постоянно сканировать лидаром окружение и сопоставлять полученную 3D-картину с эталонной, заранее загруженной 3D-картой города.
Проблема предсказания
Видеть — это только половина дела. Намного сложнее — предсказывать. Эта задача известна как «отслеживание нескольких объектов» (Multi-Object Tracking, MOT).
Автопилот трамвая должен одновременно отслеживать в плотном и смешанном трафике десятки объектов, таких как машины, пешеходы, велосипедисты, и постоянно предсказывать их траектории. Эпицентр этой проблемы — перекресток. Чтобы понять его сложность, нужно разобраться в "конфликтных точках".
Исследования показывают, что обычный четырехсторонний перекресток, где автомобильное движение пересекается в одной плоскости, имеет 32 (тридцать две!) такие точки. И снова, физика трамвая делает эту IT-задачу нерешаемой в лоб. Беспилотный автомобиль, предсказав опасность, может совершить маневр уклонения — свернуть. У 30-тонного трамвая такой опции нет. Его единственные действия — ехать, тормозить или применять экстренное торможение. Это жесткое ограничение означает, что его алгоритм предсказания должен быть на порядок точнее и консервативнее, чем у автомобиля. Он не имеет права на ошибку.
Проблема правил
Финальный вызов — социальный. Робот живет по правилам. Он запрограммирован идеально соблюдать ПДД. Люди же постоянно нарушают правила. Проскакивают на желтый, поворачивают не из того ряда, перебегают дорогу в неположенном месте.
Это создает дилемму для автопилота:
🔵 Если трамвай будет параноидально безопасным и будет тормозить перед каждым пешеходом, который потенциально может ступить на рельсы, он будет постоянно экстренно тормозить. Это приведет к срыву расписания и транспортному коллапсу.
🔵 Если же он будет слишком доверчивым (ожидать, что все соблюдают ПДД), он попадет в аварию при первом же нарушении.
Найти баланс между безопасностью и эффективностью в хаотичной человеческой среде — это нерешенная проблема.
Инфраструктурная поддержка
//Как город помогает автопилоту
Кажется, что проблемы из предыдущего раздела нерешаемы. Но это так, только если пытаться решить их исключительно с помощью технологий, установленных на борту трамвая. И вот главный тезис этой статьи: успех беспилотного трамвая зависит не столько от программистов, сколько от городской политики и умной инфраструктуры, которая помогает роботу.
Выделенная полоса как метод устранения конфликтных точек
Самый умный способ решить проблему 32 конфликтных точек на перекрестке — это их физически устранить. Когда городские власти переводят трамвайные пути с «совмещенки» на полностью выделенную полосу (в идеале — поднятую на подиум), они совершают чудо. Они превращают хаотичную открытую систему в полузакрытую. Это радикально снижает сложность задачи для ИИ.
Цифровая поддержка: адаптивный приоритет и V2I
Если физически убрать помеху нельзя, нужно «расчистить» путь цифровым сигналом. Здесь на сцену выходят две технологии.
Первая — «умные перекрестки». Здесь появляется второй важный термин. Это не просто удобство. Пилотные проекты показывают, что такой приоритет снижает среднее время прохождения перекрестка на 24-45% и увеличивает пропускную способность коридора на 25-35%.
Вторая, более продвинутая технология — V2X (Vehicle-to-Everything), или «общение» транспорта со всем вокруг. Конкретно нас интересует V2I (Vehicle-to-Infrastructure) — «общение» трамвая со светофором. Это меняет всю парадигму. Трамвай не просто реагирует на зеленый свет, который он «увидел» камерой. Он договаривается со светофором о проезде. Умный светофор по V2I-каналу сообщает автопилоту: «Я сейчас красный, но стану зеленым через 15 секунд». Получив эту информацию, автопилот не будет резко тормозить, а плавно скорректирует скорость. Это и есть решение проблемы «слепых» сенсоров. Вспомним «проблему зрения». В метель лидары и камеры ослепли, а радар не может прочитать сигнал светофора. Автопилот может физически не увидеть красный. Но если светофор сам по V2X-каналу сообщит трамваю свой статус, то «проблема зрения» для этой конкретной задачи исчезает.
Это доказывает, что инвестиции в инфраструктуру, V2X и умные светофоры, могут быть более надежным и дешевым решением, чем бесконечные попытки создать идеальные всепогодные сенсоры.
Человек в контур»: удаленный контроль нештатных ситуаций
Даже в самой умной системе что-то пойдет не так. На пути случится ДТП или на рельсы упадет дерево. На этот случай предусмотрена страховочная сетка — удаленный оператор, а именно телеуправление. В специальном центре управления сидит человек, который следит за несколькими трамваями. В нештатной ситуации система подает ему сигнал, он подключается, видит на экранах поток видео и берет управление на себя, чтобы объехать препятствие или безопасно довести вагон до депо.
Отказоустойчивость и новые регламенты обслуживания
И, наконец, система должна уметь не только работать, но и «болеть» безопасно. На практике это может означать, что вместо полной скорости, автопилот снижает ее до безопасных 10 км/ч или выполняет контролируемую остановку и ждет команд от удаленного оператора.
Внедрение таких сложных систем полностью меняет и подход к техническому обслуживанию. Одно дело — чинить механику, другое — обслуживать робота. Появляется концепция «автономного обслуживания», когда сами операторы проводят ежедневные базовые проверки: чистка линз камер и лидаров, осмотр сенсоров.
Этот переход к проактивному автономному обслуживанию и диагностике сложных сенсоров требует полной цифровизации ТОиР. Управлять жизненным циклом, калибровками и проверками вручную невозможно. Эту задачу решают современные EAM-системы. Одна из таких систем разработана в нашей Лаборатории и называется СОТА ЛАБ.РЕСУРС. Переходите на страницу продукта чтобы узнать больше о применении РЕСУРСА.
Решение — в партнерстве
//Дорожная карта для города и IT
Как показывают предыдущие разделы, сложность задачи такова, что ее невозможно решить в одиночку — ни силами города, как заказчика, ни силами одной IT-компании, как поставщика. Попытка создать идеальный вагон, способный автономно выжить в хаосе, и выпустить его на неподготовленные улицы, обречена на провал.
Наиболее жизнеспособной и эффективной моделью для реализации таких мегапроектов в сфере умного города является государственно-частное партнерство. В этом подходе город и технологический партнер действуют как единая команда, разделяя риски, инвестиции и компетенции. Мировая практика показывает, что успешные проекты внедряются не сразу, а по четкой поэтапной дорожной карте.
Этап 1 Безопасная песочница: цифровое Депо
Первый и самый логичный шаг — автоматизация не на линии, а в депо. Это закрытая, контролируемая среда, идеальная для отладки базовых функций. В рамках проекта AStriD (автономный трамвай в депо) в Германии именно автоматизация депо была названа первым шагом к беспилотникам на линии. Здесь, в партнерстве с IT-компанией, отрабатываются низкоскоростные маневры: движение на мойку, парковка на ночной отстой, прохождение автоматизированной диагностики. Одновременно внедряются новые регламенты технического обслуживания, включая принципы автономного обслуживания, когда операторы сами учатся проводить базовые проверки и очистку сенсоров.
Этап 2 Полузакрытая среда: пилотный маршрут
После успешной отладки в депо, технология выходит на линию, но не в хаос, а на специально подготовленный, полузакрытый маршрут. В идеале — полностью выделенная полоса, как обсуждалось ранее, где минимизированы конфликтные точки. Этот маршрут в рамках ГЧП оснащается умными светофорами и, возможно, модулями V2X. Здесь технология учится реальному миру в безопасных, контролируемых условиях.
Этап 3 Полная интеграция: Интеграция телеуправления в городскую инфраструктуру
Это зрелая фаза партнерства. Вместо создания дублирующих структур, функционал телеуправления интегрируется в существующие, проверенные диспетчерские центры города. Это позволяет операторам города и инженерам IT-компании работать в единой связке. Когда автопилот на любом из маршрутов сталкивается с нештатной ситуацией, например ДТП на путях, падение дерева, отказ сенсора, и переходит в режим деградации, он не останавливает движение, а немедленно отправляет сигнал в центральную диспетчерскую службу. Удаленный оператор подключается, оценивает обстановку и либо дает команду верхнего уровня, например, «ползти 5 км/ч», либо берет вагон на прямое ручное телеуправление. Это и есть синергия — робот справляется с 99% задач, а человек, используя уже налаженные городские системы, — с оставшимся 1%.
От технологии на борту к единой городской системе
//Заключение
Мы начали с того, что трамвай на автопилоте — задача неизмеримо более сложная, чем беспилотное метро. И теперь мы видим, почему. Проблема не в том, чтобы написать код, который заставит вагон ехать по рельсам. Проблема в том, чтобы научить робота выживать и безопасно функционировать в хаосе городской улицы, в плохую погоду и в окружении непредсказуемых людей.
Пытаться решить эту проблему в лоб, то есть за счет установки на трамвай все более дорогих и сложных сенсоров — это тупиковый путь. Супер-глаза все равно ослепнут в метель, а супер-мозг не предскажет безрассудного пешехода.
Как показывает мировой опыт, ключ к успеху заключается в модели сотрудничества. Успех — это не просто умный трамвай и умный город, а глубокая интеграция их систем. Это партнерство, где город не просто закупает технологию, а технологическая компания не просто поставляет железо.
Это долгосрочный совместный проект, где город готовит физическую и цифровую инфраструктуру — выделенные полосы, умные светофоры, а IT-партнер бесшовно встраивает свои решения, включая телеуправление, в уже существующие и отлаженные городские процессы, такие как работа единых диспетчерских центров. Таким образом, успех — это результат не столько покупки, сколько общей стратегии и глубокой технологической экспертизы обеих сторон.
Интеллектуальная система мониторинга подвижного состава общественного транспорта
Успех автопилота невозможен без тотального контроля. Лаборатория СОТА разработала БЕЗОПАСНЫЙ ПОЕЗД, который в беспилотном контуре как раз выступает телеинформационной станцией, передавая телеметрию для ситуационного контроля. Система в реальном времени отслеживает техническое состояние, предупреждая о сбоях и обеспечивая безопасность. Узнайте больше о нашей платформе мониторинга.