В статьи представлен процесс оптимизации математической модели системы управления углом тангажа летательного аппарата. Решение задачи оптимизации осуществляется через программный код на Python.

Данный материал представляет собой продолжение ранее опубликованной работы, посвящённой разработке математической модели продольного движения самолёта. В указанной работе, наряду с моделированием динамики летательного аппарата, была реализована система управления, основанная на использовании ПИД-закона. В результате построения модели получена временная зависимость угла тангажа. Следующим этапом исследования является разработка метода автоматической настройки коэффициентов ПИД регулятора, обеспечивающего достижение требуемых критериев качества динамического отклика системы.
Анализ результатов расчетов модели управления углом тангажа самолета
Для анализа результатов расчетов и адаптации модели системы управления углом тангажа ЛА используются следующие критерии качества отклика:
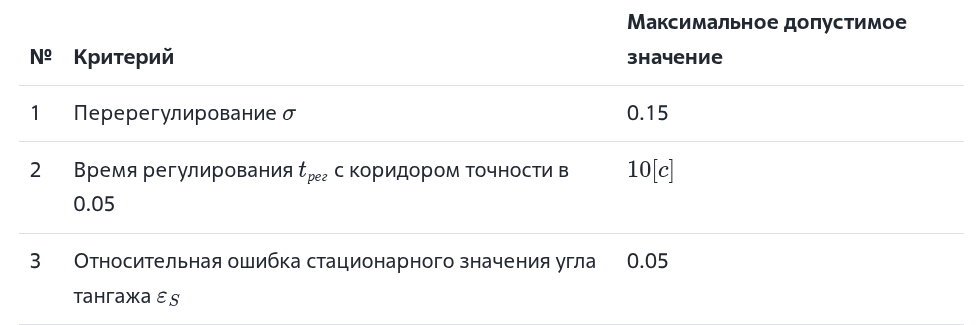
Критерии качества отклика определяются как:
Тогда критерий времени регулирования t_рег с диапазоном точности в 0.05 будет выглядеть:
Далее необходимо провести анализ результатов расчёта модели системы управления углом тангажа ЛА, выполненного с исходными данными. Применяя формулу (1), получаются следующие значения критериев:
Следует вывод: критерии качества не выполнены. Модель требует настройки коэффициентов системы управления.
Эмпирический метод настройки коэффициентов модели системы управления может занимать длительное рабочее время. С целью снижения трудозатрат настройки коэффициентов системы управления и для повышения точности по адаптации модели необходимо воспользоваться оптимизатором.
Оптимизация модели системы управления
Задача оптимизации Минимизировать целевую функцию вида (2)
В функции применяются следующие обозначения w_o, w_s, W_tрег — весовые коэффициенты для перерегулирования, стационарной ошибки и времени регулирования, позволяющие по-разному учитывать эти компоненты ошибок.
Минимизация целевой функции означает уменьшение ошибок и достижение параметров требуемой работы системы управления/ Дополнительно, после проведения оптимизации проверяются требования критериев качества модели:
При решении оптимизационной задачи используются следующие ограничения на переменные:
В итоге имеем задачу оптимизации:
Решение данной задачи реализуется в ноутбуке ПО REPEAT.
Подключение модели через REPEAT и необходимых библиотек реализуется следующим скриптом:
Далее требуется настроить подключение к REPEAT и выбрать модель для решения оптимизационной задачи и выполнить проверку подключения.
Выполним подготовку критериев качества отклика в соответствии с формулами (1) и допустимыми значениями критериев.
Методы расчёта критериев качества класса СontrolСriterion далее будут использоваться при реализации целевой функции objective_kernel далее.
Подготовим вспомогательную функцию run() для взаимодействия с REPEAT для передачи значений глобальных переменных модели и для последующего получения результатов расчёта временного ряда значений угла тангажа.
Реализуем подготовку вспомогательной функции обеспечения взаимодействия с интерфейсом пакета spicy для дальнейшего процесса решения оптимизационной задачи.
Настроим взаимодействие с оптимизатором:
Для выполнения анализа результатов необходимо запустить модель системы управления с оптимальными значениями коэффициентов ПИД-регулятора для получения актуальных результатов изменения угла тангажа ЛА.
Результаты
В результате проделанной работы выполняется построение графика, для анализа актуальных результатов.
Результаты анализа критериев качества системы управления представлены в таблице ниже.
Критерии качества системы управления соблюдены, настройка ПИД регулятора проведена успешно.
Использованная литература
- Разработка математической модели системы управления углом тангажа летательного аппарата - URL: https://app.repeatlab.ru/docs/ru/howto/aircraft/attitude_angle_flight_control/index.html