В рамках статьи описана математическая модель продольного движения самолета. Представлен процесс разработки математической модели продольного движения самолёта с помощью блока Jython.

Математическая модель продольного движения самолёта
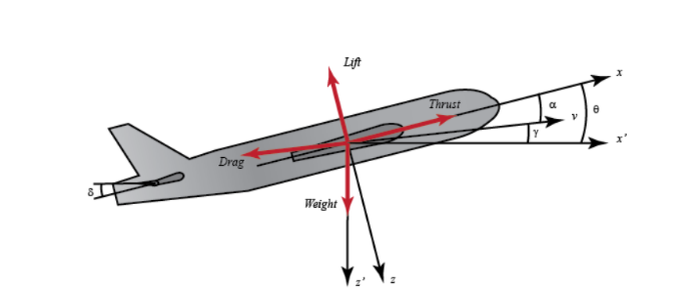
На рисунке 1 изображена система координат гражданского самолёта с принятыми следующими обозначениями.
Обозначения осей координат (Черные оси координат):
- Связанная система координат (СК): оси ( x, z )
- Земная система координат (СК): оси ( x', z' )
Основные силы, действующие на ЛА (Красные оси координат):
- Сила тяги (Thrust)
- Подъёмная сила (Lift)
- Сила сопротивления (Drag)
- Вес (Weight)
В модели гражданского самолёта используются следующие допущения:
- Летальный аппарат находится в устойчивом состоянии на постоянной высоте и скорости;
- Изменение угла тангажа не приводит к изменению скорости самолета.
Уравнения движения
Коэффициенты:
Обозначения:
Модель управления углом тангажа самолёта в ПО REPEAT
Система управления летательным аппаратом (ЛА) состоит из нескольких взаимосвязанных контуров, отвечающих за контроль скорости, высоты и навигации. Одним из ключевых элементов этой системы является контур управления углом тангажа, рисунок 2, который обеспечивает устойчивость продольного движения самолёта и играет важную роль в работе автопилота.
Модель продольного движения ЛА
Модель продольного движения представлен блоком Jython, где реализован в виде кода на языке Python. Код инициализации представлен ниже.
Далее представлен код расчета.
В результате выполнения Кода расчета на каждом шаге интегрирования создаётся объект out_1 выходного порта блока Jython, в который выводится актуальное значение угла тангажа .
Реализация модели системы управления углом тангажа ЛА
Для моделирования непосредственно системы управления, см. рисунок 2, используются следующие блоки:
Результаты
После запуска расчета был получен график изменения угла тангажа от времени, рисунок 3.
Использованная литература
- Разработка математической модели системы управления углом тангажа летательного аппарата - URL: https://app.repeatlab.ru/docs/ru/howto/aircraft/attitude_angle_flight_control/index.html