Камеры Topotek представляют собой профессиональное оборудование для аэрофотосъемки и видеозаписи, широко используемые в геодезии, картографии и мониторинге. Их интеграция с гексакоптером требует внимательного подхода к аппаратным и программным компонентам.
Сегодня мы попробуем осуществить подключение на примере камеры TOPOTEK TH10T6LN.
Подключение камеры Topotek: монтаж и установка
Гексакоптер должен обладать достаточной грузоподъемностью для камеры Topotek с учетом ее веса, стабилизатора и крепления. Рекомендуется провести предварительные расчеты с запасом не менее 30% от общего веса оборудования. Так как мы планируем осуществить монтаж на раму "Вампира" с грузоподъемностью до 20 кг., проблем не возникнет.
Для начала нарисуем в программе 3D моделирования удобный кронштейн для установки к раме.
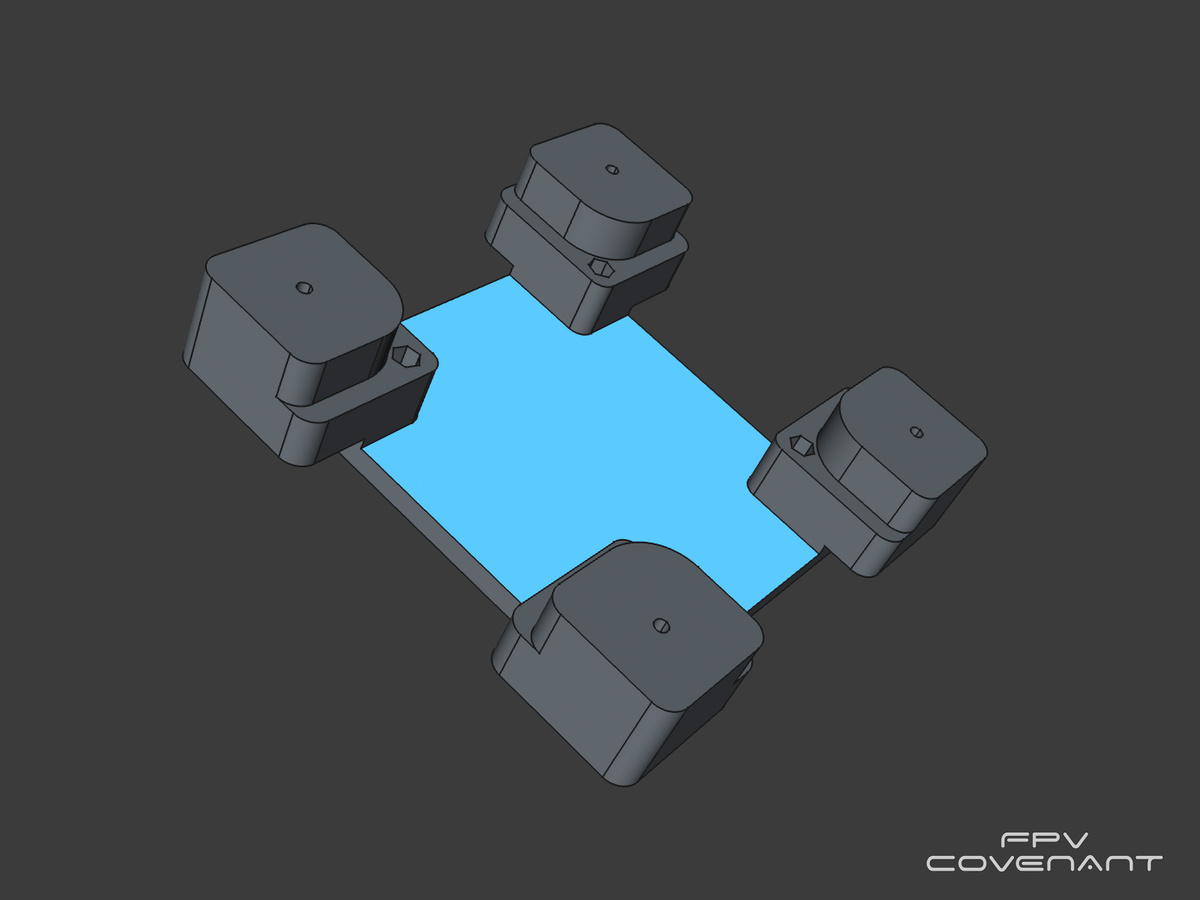
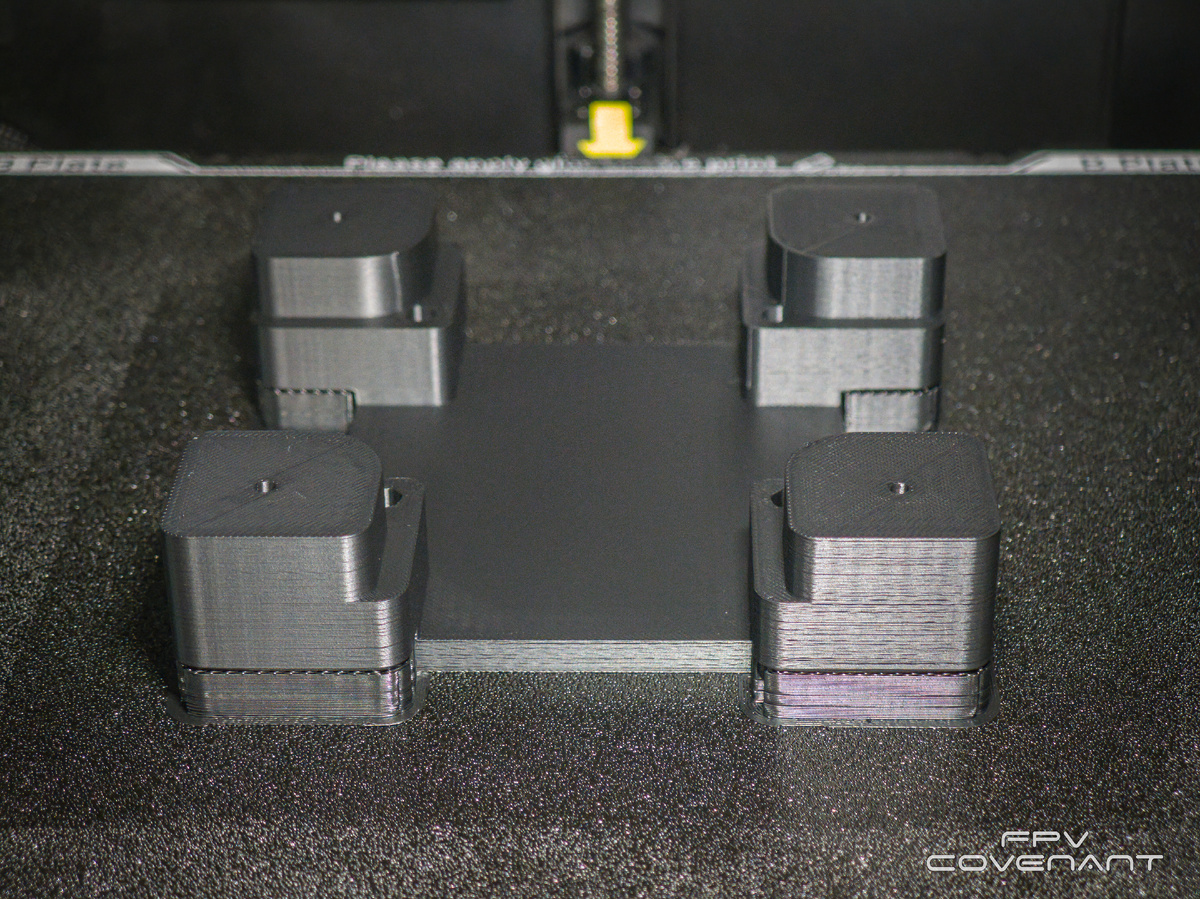
Распечатаем на принтере и посмотрим результат. Для тех кто захочет использовать в своей сборки данный кронштейн - можно тут скачать.
Крепление камеры осуществляется через виброизолирующую платформу для минимизации вибраций от двигателей. Расположение на дроне должно обеспечивать правильный центр тяжести дрона. Установим камеру в заранее определенное место на раме.
Подключение камеры мы осуществим к юниту Herelink, для этого изготовим провода питания и передачи информации.
Камера Topotek: подключение оборудования
Электропитание камеры Topotek — критически важный аспект. Обычно она требует стабильного напряжения, которое может отличаться от стандартного питания полетного контроллера. Поэтому воспользуемся свободным разъемом на модуле распределения питания.
Важно отметить устанавливаемая нами камера не идет в стандартной сборке "Вампира" и для нее требуется более высокое напряжение питания 12-24 В!
Нам потребуется изготовить провода питания. Отмеряем длину проводов и подпаиваем разъемы Xt-30 с двух сторон.
Для изготовления провода передачи информации обратимся к распиновке разъемов.
Используя схему изготовим провод соединяющий камеру с юнитом Herelink.
Учитывая, что все кабели должны быть проложены таким образом, чтобы избежать натяжения и контакта с подвижными частями, воспользуемся изолентой на основе флиса для дополнительной защиты.
Подключим изготовленные провода между камерой и юнитом Herelink, а так же кабель питания.
На этом этапе монтаж окончен. Приступим к конфигурации установленного оборудования.
Подключение камеры Topotek: конфигурация оборудования
Подключение гексакоптера к компьютеру и управление мы будем осуществлять с помощью наземной станции управления. О сборке мы рассказывали подробно тут:
Для начала нам требуется проверить правильность подключения оборудования. Включаем компьютер, наземную станцию управления и дрон.
При сопряжении все четыре устройства оказываются в одной сети:
- наш компьютер имеет IP адрес: 192.168.144.3
- юнит наземной станции имеет IP адрес: 192.168.144.11
- юнит дрона имеет IP адрес: 192.168.144.10
- камера имеет IP адрес: 192.168.144.108
Проверить оборудование можно пропинговав каждое устройство командой Ping (ip) в консоли windows
Так же вариант воспользоваться приложением для сканирования ip адресов, установив диапазон 192.168.144.1 - 192.168.144.255
Как мы видим все устройства исправны и находятся в одной сети.
Далее мы можем попробовать вывести изображение на компьютер. Самое простое воспользоваться приложением VLC media player или оригинальным приложением для камер TOPOTEK.
Загрузив приложения потребуется вписать адрес стрима (как правило наклеен на камере) и нажать на кнопку проигрывания.
Мы увидим видеоизображение полученное с камеры.
В оригинальном приложении есть большое количество настроек и возможность калибровки подвеса камеры. Так же можно управлять подвесом.
Попробуем вывести изображение с камеры в Mission Planner.
Запускаем Mission Planner на ноутбуке с подключенным модулем Herelink.
Нам потребуется выбрать режим подключения UDPCI и нажать CONNECT.
Вводим IP адрес 192.168.144.11 (Как мы уже разбирались выше это адрес юнита наземной станции управления).
Вводим порт удаленного подключения 14552 (при следующем подключении эти данные сохранятся).
Наша наземная станция удачно подключилась к дрону через радиоканал организованный между двумя модулями Herelink.
Далее нам потребуется щелкнуть правой кнопкой мыши в окне HUD, выбрать VIDEO и SET GSTREAMER SOURCE
Функция GSTREAMER позволяет стримить видео в окне с любого источника видео находящегося в сети.
Нам потребуется ввести источник видео который имеет определенный формат (GStreamer pipeline).
Рассмотрим варианты GStreamer pipeline:
Для USB-камеры:
v4l2src device=/dev/video0 ! videoconvert ! video/x-raw,format=YUY2 ! appsink
Для RTSP потока:
rtspsrc location=rtsp://адрес:порт/stream ! rtph264depay ! avdec_h264 ! videoconvert ! video/x-raw,format=BGR ! appsink
Для UDP потока:
udpsrc port=5600 ! application/x-rtp,payload=96 ! rtph264depay ! avdec_h264 ! videoconvert ! video/x-raw,format=BGR ! appsink
Для проверки работоспособности функции GStreamer введем в строчку тест-pipeline:
videotestsrc! video/x-raw, width=1280, height=720, framerate=25/1! clockoverlay! videoconvert! video/x-raw, format=BGRA! appsink name=outsink
Мы с вами увидим в окне эффект старого телевизора - функция работоспособна.
Теперь наша задача вставить GStreamer pipeline подходящий для нашей камеры (требуется узнать у производителя под каждую модель камеры). Попробуем:
rtspsrc latency = 0 location=rtsp://192.168.0.108:554/stream=0 ! queue ! application/x-rtp ! rtph264depay ! avdec_h264 ! videoconvert ! video/x-raw,format=BGRA ! appsink name=outsink
Мы видим как изображение с камеры появилось в окне Mission Planner.
Так же можно использовать решение состоящее из двух компьютеров и наземной станции управления соединенных между собой с помощью роутера. В таком исполнении один оператор за одним компьютером контролирует полет и карту, второй за вторым компьютером видит изображение с камеры и осуществляет управление подвесом.
Не сразу, но удалось подключить оригинальную камеру с вампира Topotek ASV290G610 (аналог KHP290G609).
Особенностью подключения является правильный источник видео который имеет определенный формат (GStreamer pipeline).
Для правильной работы требуется использовать -
rtspsrc location=rtsp://192.168.144.108:554/stream=0 latency=41 udp-reconnect=1 timeout=0 do-retransmission=false ! application/x-rtp ! decodebin3 ! queue max-size-buffers=1 leaky=2 ! videoconvert ! video/x-raw,format=BGRA ! appsink name=outsink sync=false
Подключение камеры Topotek: подведем итоги
В процессе полетов важно учитывать влияние камеры на летные характеристики гексакоптера. Увеличивается инерционность, что требует более плавных маневров. Дополнительная аэродинамическая нагрузка может снижать максимальную скорость и время полета.
Интеграция камеры Topotek с гексакоптером открывает возможности автоматизации съемки. Используя возможности планировщика миссий, можно создавать сложные маршруты с автоматическим управлением параметрами съемки в разных точках.
Ключом к надежной работе является тщательность на каждом этапе: от выбора совместимых компонентов до регулярного обслуживания. При правильной реализации система обеспечивает стабильную работу в различных условиях эксплуатации.
Друзья если статья была для вас полезна, ждем лайк)))