Беспилотный автомобиль нельзя выпустить в город, не прогнав ПО через тысячи испытаний. Варианты у инженеров есть, но со своими минусами: реальные дороги — дорого и опасно, виртуальные симуляторы — слишком оторваны от жизни. Помогают полигоны, но и они неидеальны — их статичность ограничивает фантазию.
Решение нашли создатели платформы «Робовейник» (НИУ «МЭИ»). Они сделали полигон из блоков, как огромный конструктор. Его можно быстро собрать в нужную конфигурацию, создавая сложные городские сценарии и легко их меняя. Это гибко, масштабируемо и ускоряет процесс доводки автопилотов.
От статики к гибкости: зачем нужен новый полигон?
Классические полигоны для тестирования беспилотников – это монолитные, тяжелые конструкции. Их невозможно изменить или легко перевезти. Этот недостаток стал главной мотивацией для создания нового формата
«Мы много лет работали с монолитными полигонами и постоянно сталкивались с проблемой транспортировки. Перевозка превращалась в спецоперацию, требовавшую усилий нескольких человек. Теперь же, с блочным полигоном, один сотрудник может легко перенести его из одного корпуса института в другой» (Константин Бошков – разработчик команды «Робовейник»)
Ключевая идея – модульность. Каждый элемент системы, будь то дорожное покрытие, мобильный робот или система навигации, состоит из простых блоков. Их можно быстро собрать, разобрать, компактно упаковать и транспортировать. Это решает не только проблему перевозки, но и масштабирования.
«Монолитный полигон имеет конечные габариты, которые нельзя изменить. Наш полигон, состоящий из блоков, можно расширять почти до бесконечности. Новые элементы дороги просто соединяются с основной картой (Константин Бошков – разработчик команды «Робовейник»)
Из чего состоит полигон и как он работает?
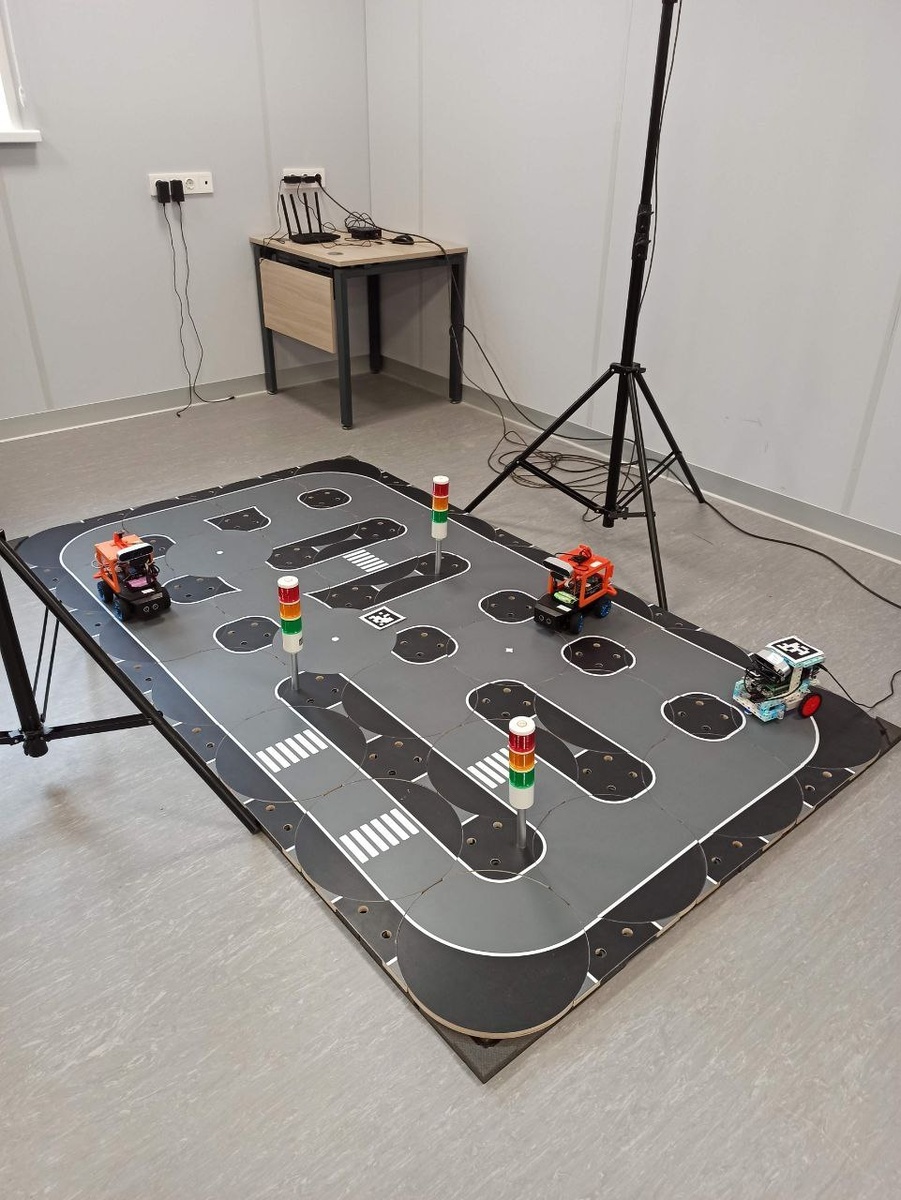
В основе полигона лежит модульная система, включающая несколько ключевых компонентов:
- напольное покрытие: состоит из мягкой подложки, круглых элементов дорог и соединителей в форме звезд, что позволяет создавать практически любую конфигурацию дорожной сети.
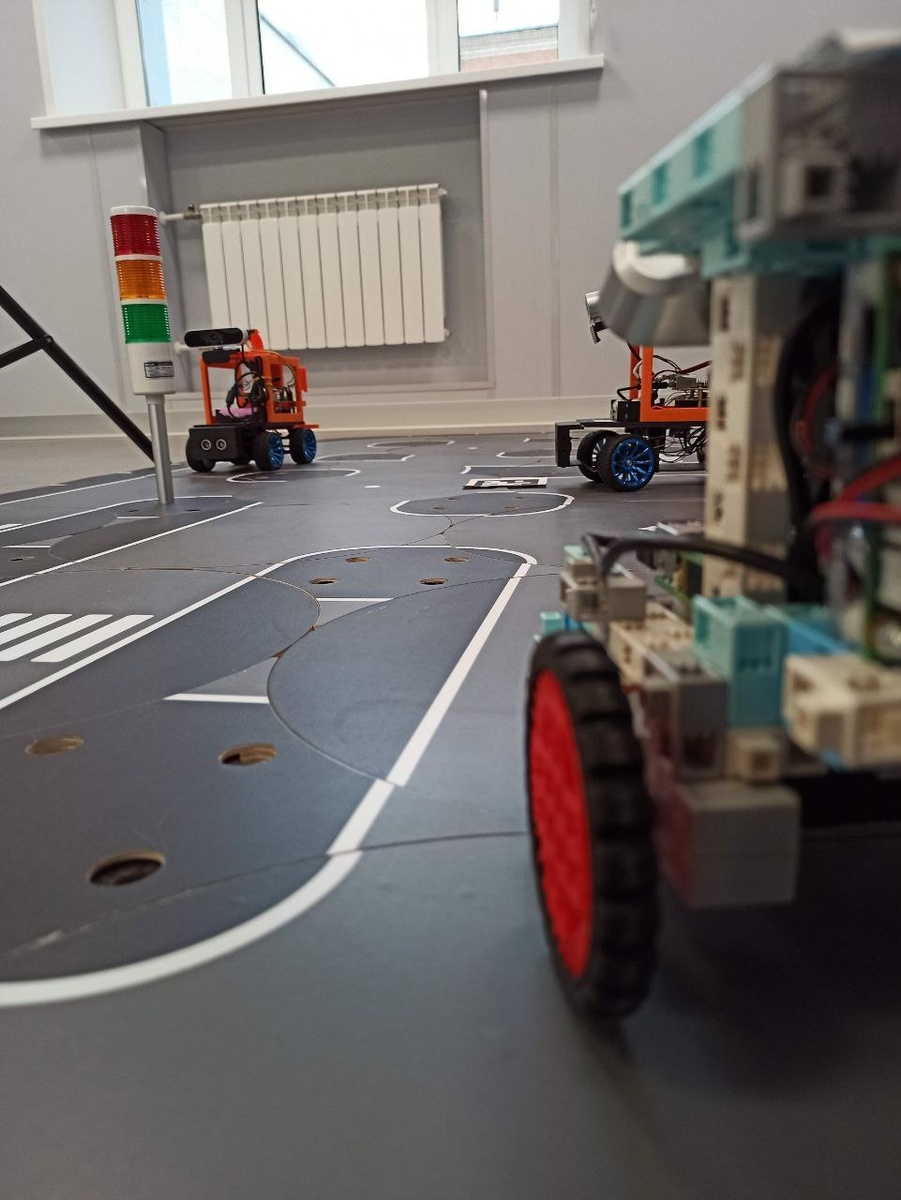
- мобильные роботы: два робота, собранные из деталей конструктора, выполняют роль автономных транспортных средств.
- внешняя навигационная система: камера, закрепленная на специальном штативе, отслеживает положение роботов по маркерам на их корпусах и передает точные координаты.
Процесс переконфигурации максимально упрощен. Инженеры физически собирают новую карту из дорожных блоков, а затем обновляют ее схему в программном обеспечении.
Программное обеспечение: новый интерфейс и локальный режим
Вместе с «железом» обновилась и программная часть. Разработчики полностью пересмотрели пользовательский опыт, сделав его более структурированным. Теперь работа инженера делится на три четких этапа: написание кода, управление роботом и мониторинг системы.
Появление внешней навигационной системы дало ключевое преимущество – теперь в веб-интерфейсе виден весь макет целиком, а не только изображение с камеры робота. Это обеспечивает полный визуальный контроль над экспериментом.
Еще одно важное нововведение – возможность работы в офлайн-режиме. Система может запускать локальный мини-сервер, к которому подключается камера и робот. Это позволяет проводить испытания без доступа к интернету, что критически важно для выездных мероприятий или работы в помещениях с плохой связью.
На вопрос об автоматической адаптации ПО к изменениям карты разработчики отвечают, что система работает иначе. Полигон предоставляет точные данные о новой конфигурации и местоположении робота, а задача пользователя – написать управляющий скрипт, который будет корректно работать в заданных условиях. Это делает полигон мощным инструментом для обучения и отладки алгоритмов, а не системой, которая «думает» за инженера.
Новые горизонты: от хакатонов до отраслевого стандарта
Гибкость блочного полигона открывает широкие возможности не только для пользователей, но и для самого проекта «Робовейник», выводя его на новый этап развития.
Во-первых, это образование и соревнования. Стало значительно проще разворачивать копии полигона в партнерских школах, университетах или на выездных инженерных конкурсах.
«Наши мастер-классы теперь станут еще более наглядными. Мы можем быстро собирать сложные дорожные сценарии и демонстрировать больше функциональных возможностей нашей платформы» (Константин Бошков – разработчик команды «Робовейник»)
Во-вторых, это стандартизация и сотрудничество. С появлением полигона команда вводит новый стандарт для полунатурных экспериментов в области навигации колесных роботов. Это упростит совместную работу разных команд и позволит им тестировать алгоритмы в унифицированной среде.
Но самое главное – модульный формат превращает полигон из штучной научной разработки в готовое серийное решение. Теперь его можно поставлять в десятки учебных заведений и исследовательских центров, активно демонстрировать на выставках и форумах. Раньше этому мешала сложная логистика. Это открывает дорогу к массовому внедрению и выводит сам проект на новый уровень – от внутреннего инструмента для экспериментов к полноценному продукту для широкого рынка.
В планах – увязать несколько таких макетов в единую распределенную сеть.
«Все полигоны могут объединяться в общую сеть через сервер. Если у двух пользователей есть наши полигоны, они могут в реальном времени видеть роботов друг друга. Мы получаем своего рода мета-вселенную для беспилотников или эффект телеприсутствия. Поскольку полигоны стандартизированы, создание такой сети – лишь вопрос времени» (Андрей Разорвин – инженер команды «Робовейник»)
Будущее проекта: что дальше?
Хотя платформа уже активно используется, команда видит точки для роста. На данный момент полигон не имитирует пешеходов и плотный дорожный трафик, а у светофоров пока не реализована система питания. Эти задачи – в списке ближайших доработок.
В будущем планируется добавить новые интерактивные модули, такие как шлагбаумы и светофоры, с возможностью настраивать сценарии их работы прямо из облачного интерфейса.
Разработчики уверены, что такой подход имеет все шансы стать новым отраслевым стандартом для испытаний автономных систем, делая разработку и тестирование доступнее, быстрее и эффективнее.