Продолжим рассматривать возможности беспроводного пульта управления от компании MakeBlock. Ранее мы уже говорили о том, что данный пульт обеспечивает огромное количество возможностей управления, и активно используется на соревнованиях роботов.
Сегодня будем пробовать программу управления движением робота с помощью джойстика на пульте. Напомним про суперфункцию - наличие 8-гранного бортика, ограничивающего движение каждого из двух джойстиков. Угол прямо: значение, снимаемое с оси Х = 0, а значение, снимаемое с оси Y = 100. И мы можем при таких значениях дать Роботу команду ехать прямо.
Далее оператор может перемещать джойстик по граням бортика, обеспечивая точные значения для управляющих сигналов.
Пример - джойстик влево: Х < 0, а Y < 100. Мы можем создать формулу для управляющего воздействия, обеспечивающую точное соответствие углов поворота и наклонов джойстика направлению движения и скорости робота.
Подробно все это изложено в нашей книге "Секреты спортивной робототехники с mBot2 и mBlock5", там же приведена "секретная" программа от Александра Чернова, позволяющая реализовать такое управление.
Но даже для тех, у кого книги в руках нет, остается замечательная возможность исследовать сами программы, так как электронный архив книги выложен на страницах правообладателей. Там присутствует библиотека программ, которые вполне можно загружать в ьИдщсл5 и анализировать, как они устроены.
Так можно найти и программу для управления Роботом с помощью одного из двух джойстиков (в данном случае - правого), попробовать ее в работе и создавать на ее основе новые проекты.
Нам же потребуется только часть данной программы, непосредственно относящейся к управлению джойстиком. Выглядеть она будет так:
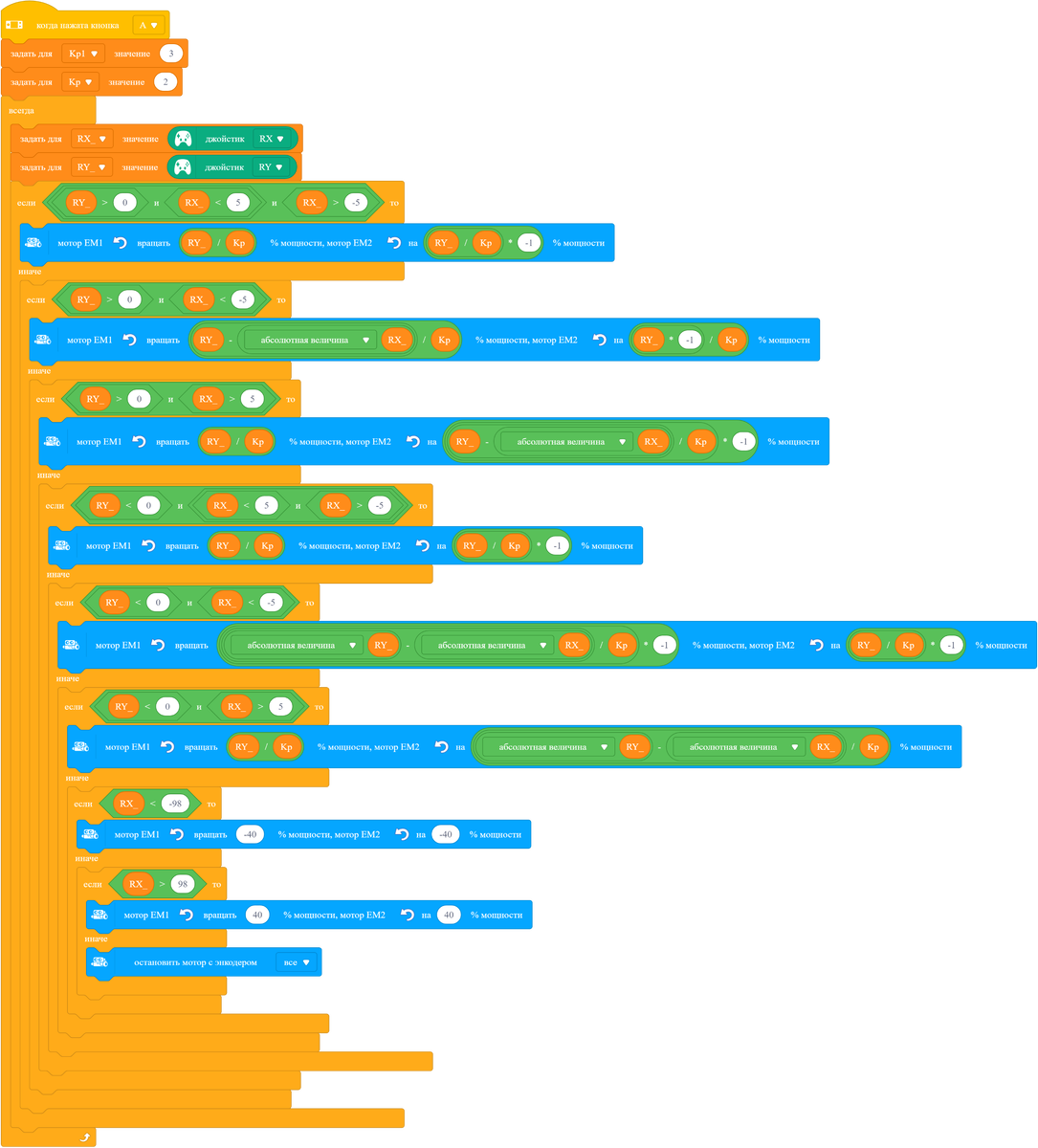
Попробуйте загрузить программу на робота, проведите сопряжение пульта, нажмите кнопку А на роботе для запуска, и наслаждайтесь управлением движением с помощью правого джойстика на пульте.
На всякий случай, полный файл Pult_Move_1.mblock выложен в электронный архив проекта.
Разберитесь в работе программы, постарайтесь ее апгрейдить. Например, чтобы при точной фиксации джойстика в углах бортиков робот точно ехал в выбранную сторону. Это интересная работа и результат может вас порадовать. Пробуйте!