«Луноход‑0» называют первым советским прототипом лунной машины. Он не долетел до Луны и был уничтожен во время наземных испытаний, но именно на нём отрабатывали ходовую, управление, тепловой режим и «зрение» будущего «Лунохода‑1». Это история не провала, а инженерной школы: когда машину сознательно доводят до отказа, чтобы следующая прожила на Луне почти год.
Где родилась идея «лунной машины»
В середине 1960‑х конструкторское бюро Лавочкина получило конкретную задачу: создать самоходный аппарат для длительной работы на Луне. Поводом стала новая реальность космической гонки. После первых мягких посадок автоматов и подготовки пилотируемых экспедиций стало ясно: на поверхности нужны «глаза и колёса», которые смогут разведать маршрут, проверить грунт, обойти опасные склоны, а заодно провести серию экспериментов там, где посадочный модуль не дотягивается.

Кто именно продвигал идею. На уровне замысла работали сразу несколько групп: системные инженеры ОКБ Лавочкина, специалисты по ходовой из школ вездеходостроения и научные коллективы, формулирующие задачи для будущей программы. Роль главного интегратора взяло на себя КБ Лавочкина: здесь собирали требования, выбирали общую архитектуру и отвечали за бортовые системы, энергетику и связь. К работам привлекались профильные институты по материалам, электроприводам, терморежиму и радиолиниям.
Когда и где начиналась проработка. Первые эскизы и макеты относились к началу–середине 1960‑х. Теоретическая часть шла в Москве, рядом с производством и испытательными стендами. Для натурных проверок создавались «лунодромы» — испытательные площадки с искусственными камнями, насыпями, наклонными рампами и грунтами‑имитаторами. Такие полигоны появились под Москвой и в Крыму, где можно было разыгрывать многочасовые заезды с задержкой связи и работать в реальном рельефе.
Зачем нужен был колёсный аппарат, если уже умели сажать спускаемые аппараты. Посадочный модуль видит лишь ближайшие метры вокруг — дальше начинаются «слепые зоны». Колёсная машина решала три ключевые задачи: расширяла радиус исследований на километры, давала гибкость маршрута (объезд валунов, кромок кратеров) и позволяла выполнять серийные эксперименты в разных точках. Ещё одна мотивация — безопасность будущих пилотируемых миссий: мобильный разведчик заранее выявляет опасные участки местности.
Что именно хотели доказать на земле. Три блока задач определили облик «нулёвки». Во‑первых, ходовая часть должна уверенно работать в рыхлом реголите, на уклонах и камнях, не закапываться и не переворачиваться при диагональном движении. Во‑вторых, тепловой режим: аппарат должен выживать при резких перепадах температур, защищать приводы и электронику от вакуума и пыли, а ночью сохранять тепло. В‑третьих, управление: операторы на Земле обязаны вести машину «с задержкой», полагаясь на телевизионные камеры и телеметрию, без «ручного касания».
Как подходили к рискам. Сразу закладывали принцип «ломаем на земле — живём в космосе». Поэтому «Луноход‑0» задумывался не как «прототип полёта», а как полноразмерный стенд для доведения до отказа. На нём можно было намеренно перегружать приводы, вызывать буксование, имитировать удары, открывать корпус в пыльной среде и фиксировать, где именно система сдаётся. Все критические узлы делали доступными для быстрой замены и доработки между сессиями.
Какие ограничения формировали архитектуру. Связь с Луной идёт с задержкой, значит, нужна предсказуемая кинематика и устойчивый обзор без «слепых» зон: отсюда панорамные камеры и спокойные скорости движения. Энергетика ограничена солнцем и аккумуляторами, поэтому приводам требовалась высокая эффективность, а теплу — «домик» внутри конструкции с хорошей изоляцией. Пыль и вакуум требовали герметичных редукторов и кабельных вводов, а также «внешней» механики без тонких открытых сочленений.
Где сходились конструкторы и учёные. Научные задачи (съёмка, радиолокация грунта, анализ рельефа) диктовали минимальные требования к стабильности платформы и к точности остановок. Инженеры в ответ предлагали компоновку с низким центром тяжести, восемью ведущими колёсами с развитым протектором и возможностью частично сохранять ход при отказе одного‑двух приводов. Так сложилась «философия» будущего лунного вездехода: лучше медленно и надёжно, чем быстро и рискованно.
Как это оформилось в «нулёвку». Когда стало ясно, какие вопросы нельзя закрыть расчётами, собрали полноразмерную машину с реальной кинематикой, массой‑макетом и бортовыми системами нужного класса. «Луноход‑0» стал универсальным инструментом: на нём тестировали управляемость на наклонных столах и «каменных садах», тепловые циклы в климатических камерах, герметичность корпусов и кабелей, а также сценарии отказов, от утери колеса до зависания на диагонали.
Смысл этапа был в том, чтобы к моменту сборки лётного изделия ответы на «как едет, как греется, как видит и как слушается» были не гипотезами, а протоколами с цифрами и пределами.
Что проверяли на «нулёвке» на земле
Ходовая и колёса
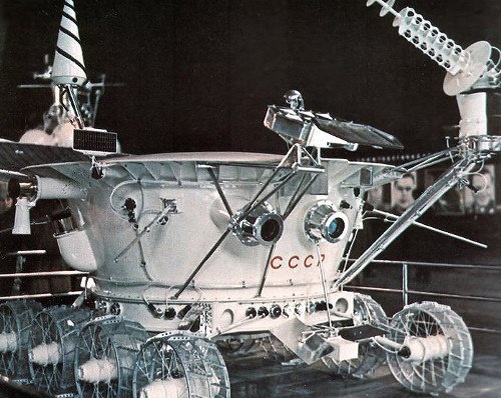
Основа будущего успеха «Лунохода» — восемь ведущих колёс с редукторами, независимыми приводами и «грунтозацепами», рассчитанными на рыхлую пыль. На «Луноходе‑0» подбирали профиль гребней, жёсткость венца и алгоритмы буксования, чтобы машина не закапывалась и могла «выползать» из ям.
Масса, центр тяжести и устойчивость
Лунный рельеф — это наклонные кромки кратеров и валуны. Прототип перевешивали грузами, играли с расположением узлов, искали безопасные углы, при которых аппарат не опрокинется при повороте и диагональном подъёме.
Тепловой режим и герметичность
Вакуум и лунные ночи требуют особого «климата» внутри корпуса. На «нулёвке» проверяли, как работает теплоизоляция, радиаторы и внутренние источники тепла; моделировали задувание пылью и отказы вентиляторов. Герметичность корпусов приводов и кабелей гоняли на перепадах температуры.
Связь и управление
Аппарат должен был жить «с задержкой»: команды с Земли приходят не мгновенно, а через секунды. Для операторов собирали «космическую» рабочую станцию, тренировали движение по картинке с камер, оценивали удобство панорам, телеметрии и аварийных сценариев. «Луноход‑0» позволял проигрывать реальные задачи — объехать камень, спуститься с пологого борта, развернуться в узком месте.
Почему прототип уничтожили — и зачем это нужно
Формулировка «уничтожен при испытаниях» звучит драматично, но для инженеров это нормальная практика: испытания «до отказа» дают данные, которые не получить иначе. «Луноход‑0» доводили до предельных нагрузок: ускоряли на неровностях, загоняли в ограничители хода, имитировали ударные перегрузки и аварийные сценарии. В какой‑то момент прототип разрушился — и это стало точкой роста. По результатам пересчитали жёсткость отдельных узлов, изменили настройки приводов, усилили элементы ходовой и уточнили алгоритмы движения по кромкам кратеров.
Главный урок: лунная пыль и ударные нагрузки ведут себя коварно. Надёжность на Луне — это не «толще металл», а «правильнее кинематика и режимы».
Что «нулёвка» подарила серийному «Луноходу‑1»
— Конфигурация восьми колёс с индивидуальными приводами и развитым протектором.
— Логику движения с осторожными поворотами и «ползущими» скоростями, чтобы не сорвать сцепление.
— Тепловую архитектуру с «тёплым домиком» внутри корпуса и щадящими режимами на границе дня и ночи.
— Компоновку камер, которая давала водителю на Земле панораму и «ощущение ширины» для точной оценки препятствий.
— Испытательную культуру: каждое изменение — через стенд, только потом на изделие.
Результат известен: «Луноход‑1» прожил на Луне почти год, прошёл километры по сложному рельефу и передал на Землю массив изображений и телеметрии. То, что выглядело «потерей» на этапе «Лунохода‑0», обернулось запасом прочности и понятными регламентами эксплуатации.