
Доцент Института естественных и точных наук ЮУрГУ Евгений Мартюшев разработал алгоритм для кинематического описания платформы Стюарта–Гофа – концепции, широко применяемой сегодня в таких устройствах, как авиасимуляторы, роботизированные манипуляторы, тактильные устройства, хирургические роботы, радиотелескопы и т. д.
Результаты исследования опубликованы в международном журнале «Теория машин и механизмов» (Mechanism and Machine theory), входящем в ТОР-5% рейтинга Scopus (https://doi.org/10.1016/j.mechmachtheory.2025.106170 ).
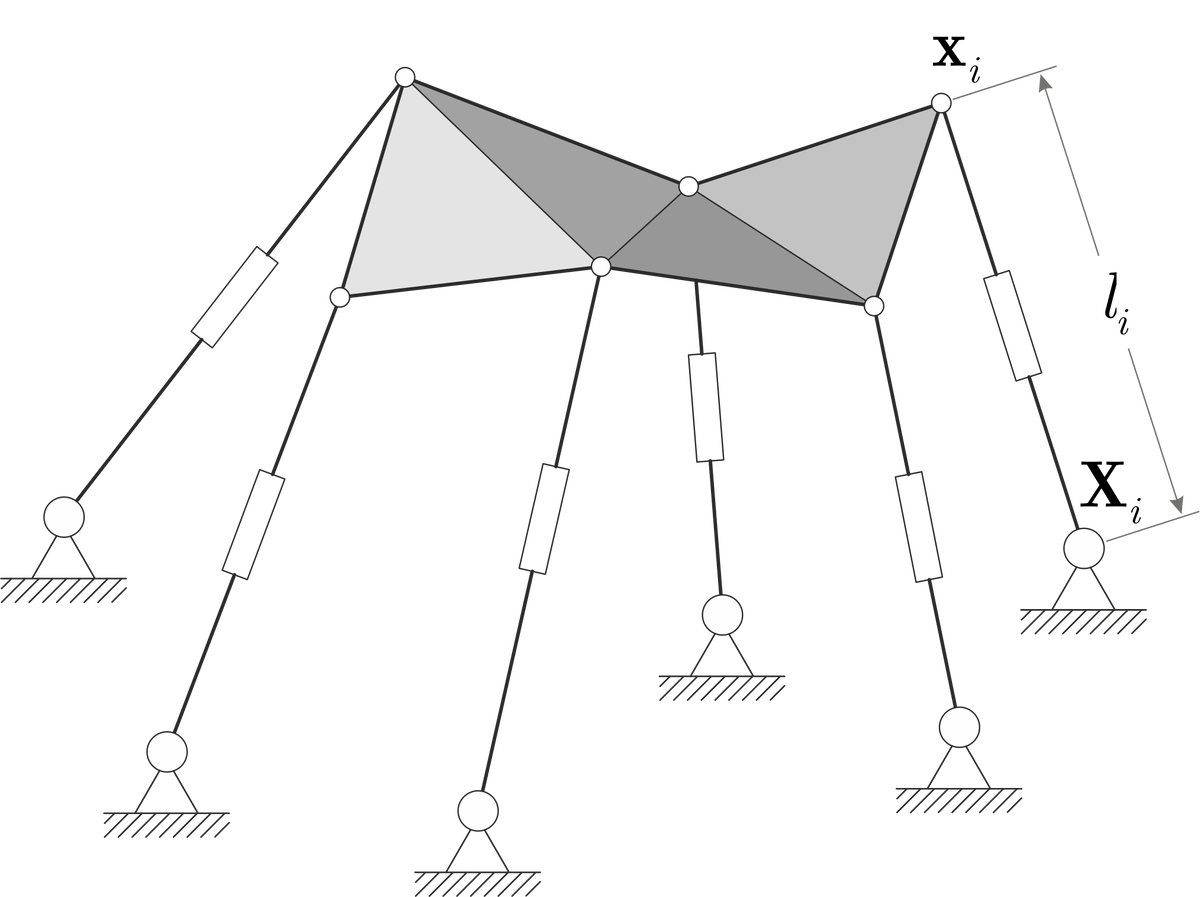
Что такое платформа Стюарта–Гофа? Представим себе подвижную платформу, стоящую на шести «ножках», которые могут независимо друг от друга удлиняться и укорачиваться. Каждая ножка закреплена на шарнирах, что позволяет платформе свободно двигаться в любом направлении: вверх-вниз, вперед-назад, влево-вправо, а также наклоняться и поворачиваться (тангаж, крен, рыскание). Именно такая конструкция лежит в основе многих высокоточных устройств.
Главная инженерная задача – точно определить положение и ориентацию платформы, зная длины всех шести ножек. Эта, на первый взгляд, простая задача на деле является чрезвычайно сложной для решения. Она сводится к системе уравнений, которая может иметь до 40 различных решений. С 1990-х годов ученые предлагали различные методы решения – от численных оптимизаций до алгоритмов машинного обучения, – но каждый из них имел свои недостатки: одни были быстрыми, но неточными, другие – точными, но чрезвычайно медленными.
Евгений Мартюшев предложил принципиально новый подход. Главное преимущество – сочетание высокой скорости и беспрецедентной точности вычислений.
«Новый алгоритм не только работает на уровне самых быстрых современных методов, но и обеспечивает численную точность, которая ранее была недостижима. При этом он основан на стандартных операциях линейной алгебры, что делает его простым для внедрения», – рассказал Евгений Мартюшев
Реализации алгоритма на популярных языках программирования – MATLAB, Julia и Python – выложены в открытый доступ на платформе GitHub. Любой инженер, программист по всему миру может воспользоваться ими.
Корректность работы алгоритма подтверждена экспериментальными данными.
Теперь Баба Яга может быть спокойна за сохранность мебели и посуды в избе!
Использованный математический аппарат – метод шаблонов исключения – может быть применен для эффективного решения других сложных задач робототехники.
Работа выполнена в рамках реализации программы топ-уровня в сфере искусственного интеллекта при поддержке АНО «Аналитический центр при Правительстве Российской Федерации».
Остап Давыдов