Природа миллионы лет тестировала простые и надёжные приёмы движения: экономия энергии, безопасность при контакте, умение обходить препятствия. В робототехнике это не ради красоты — это способ сделать машины работоспособными в реальной, грязной и непредсказуемой среде: в медицине, на ферме, при спасательных работах.
Главные идеи в понятных словах
1) Морфология — выберите форму тела робота
Решите, будет ли у робота колёса, ноги, гусеницы или змееобразное тело. Форма во многом «делает» работу за электрику и софт: правильная конструкция снижает сложность управления.
2) Уступчивость / мягкость вместо абсолютной жёсткости
Мягкие элементы позволяют нежно взаимодействовать с предметами и людьми, уменьшают риск поломки и требуют менее сложного контроля (пример: мягкий хвататель бережно подхватывает фрукт).
3) Возврат энергии — экономим за счёт упругих элементов
Пружины и упругие вставки в ногах или суставах работают как «резинки», накапливают и возвращают энергию — это даёт экономию батареи при длительной работе.
4) Местные рефлексы и простые петли управления
Вместо тонны вычислений — маленькие локальные контроллеры прямо у сустава, которые быстро реагируют на контакт. Это повышает надёжность: при отказе одной части робот всё равно продолжает работать.
5) Многоуровневая сенсорика простыми словами
Нужны «ощущения»: тактильная кожа, инерционный датчик (маленький блок, который понимает наклоны и тряску) и камера. Правильный набор датчиков делает поведение робота устойчивым в плохих условиях.
6) Гибридные материалы — жёсткое + мягкое
Комбинация жёсткого каркаса и мягкой оболочки даёт прочность и деликатность одновременно; это уменьшает износ и делает обслуживание проще.
Что реально есть и что мешает
В арсенале инженеров — «мягкие» приводы с пружиной (привод с встроенной упругостью), пневмомышцы, эластичные электрические «мышцы» и термодротовые приводы (проволока, которая сгибается при нагреве). Ограничения: батареи всё ещё тяжелы, мягкие материалы изнашиваются, а точное моделирование контактов — сложная задача. Поэтому хорошая стратегия — сначала упростить форму и материалы, потом добавлять сложный софт.
Короткие примеры
- Мягкие хвататели в пищевой промышленности — меньше бракованной продукции.
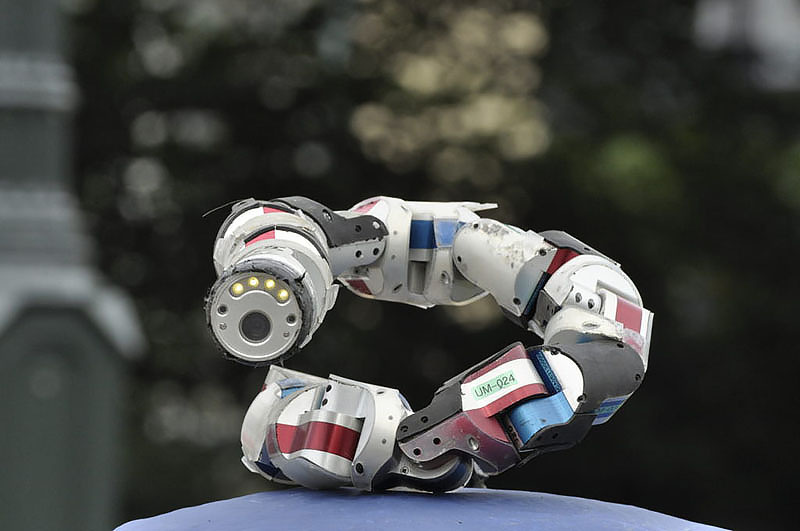
- Змееобразные роботы в спасении — пролезают в щели завалов.
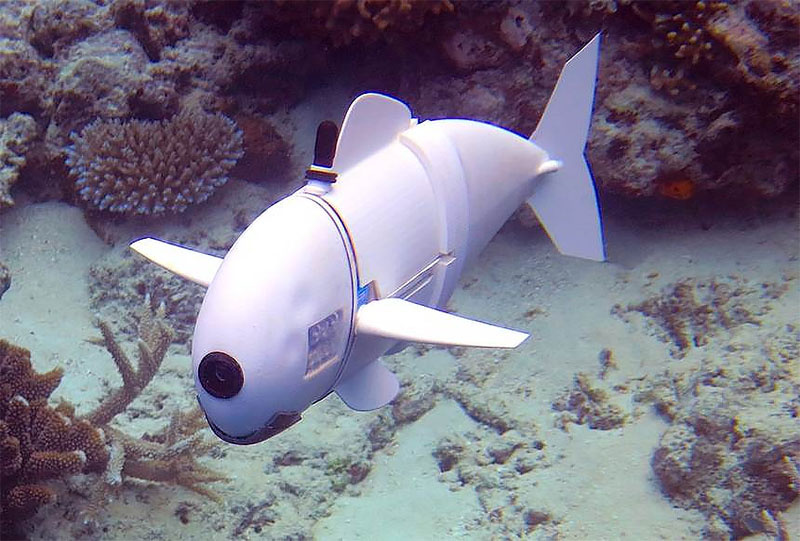
- Роботы‑рыбы — тихая инспекция подводных труб.
- Экзоскелеты с уступчивостью — помощь в реабилитации.
- Орнитоптеры (имитация крыльев) — стабильность в порывистом ветру.
Как запустить мини‑проект за 6 шагов
1) Сформулируйте задачу и 2–3 ключевых показателя эффективности (деликатность, проходимость, время работы).
2) Выберите форму тела робота и нарисуйте 2 варианта.
3) Сделайте простой прототип: жёсткий каркас + один мягкий элемент.
4) Поставьте один датчик силы и инерционный датчик; реализуйте локальный рефлекс.
5) Тест в «грязной» среде: реальный полигон, не симулятор.
6) Двигайтесь постепенно: сначала меняйте форму, потом софт.
Вывод
Бионическая робототехника — это перевод природных приёмов в инженерные решения. Первый приоритет — функция и форма; программирование приходит позже.
Хотите, поможем вам развернуть дорожную карту под вашу задачу — опишите её, и мы подумаем над конкретным планом.
Больше материалов в нашем Телеграм-канале.