Сегодня мы познакомимся с удивительной способностью устройств от MakeBlock на базе контроллера CyberPi - они могут создавать "внутренние" wifi сети для передачи данных между устройствами. Да, внешние, с пользовательскими сетями WiFi тоже могут, и это используется в проектах, ориентированных на Интернет-вещей и применение технологий искусственного интеллекта. Но сегодня мы рассмотрим именно межсетевое взаимодействие CyberPi. Устройства можно "вязать" в рой и управлять одновременно многими. А можно одно устройство использовать для управления другим, например, создавая пульт управления. Проектов может быть великое множество, только придумывай!
Мы уже несколько раз проговорили: не "робот", а устройства на основе CyberPi.
Дело в том, что основой остается CyberPi, а шилды могут быть разные. Может быть шасси робота mBot2, а может быть маленький шилд Pocket Shield, содержащий также множество портов для создания устройств, но больше "заточенный" на неподвижные устройства из мира Интернет-вещей, проекты с сервоприводами, ну и как пульт управления получается весьма неплохим устройством.
Соединяются Pocket Shield и CyberPi так же, как и в случае с mBot2, просто и удобно, через универсальный порт соединения. Состав расширения можно посмотреть на рисунке ниже.
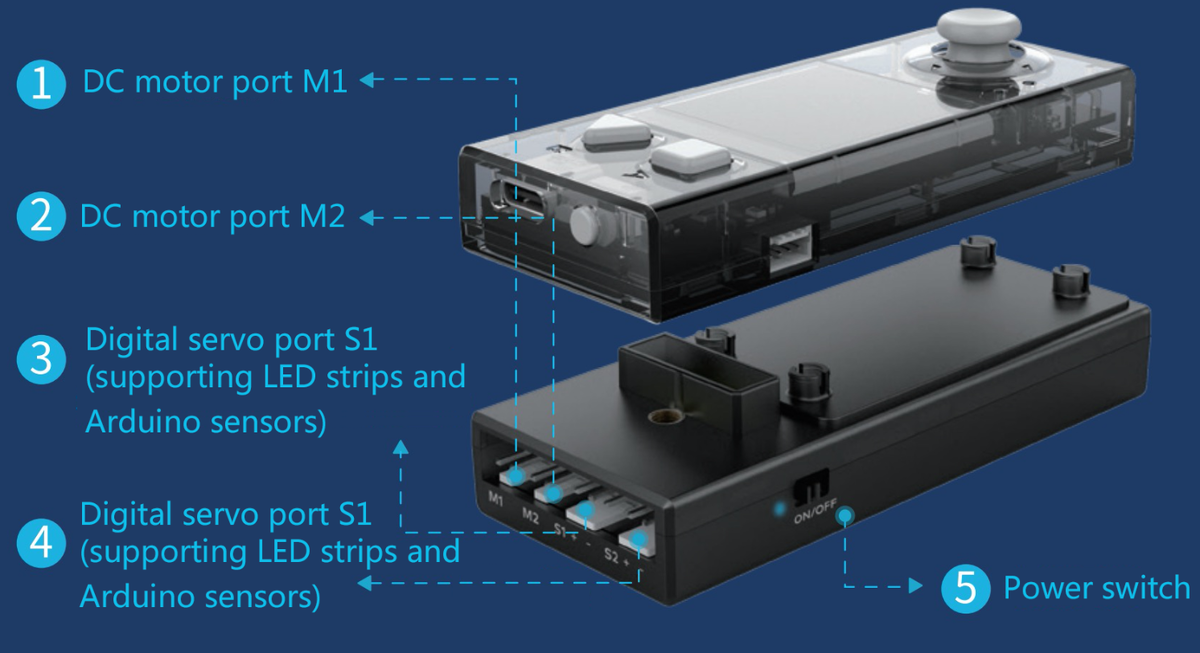
Внимание! На шилде присутствуют порты для DC моторов, такие же, как на шасси робота. Но мы пробовали собрать роботов - заменителей mBot2 на основе Pocket Shield и периодически это заканчивалось выходом шилда из строя. Так что не рекомендуем использовать мощные моторы с данным расширением. Ну, или рискуйте)).
В результате получается вот такое удобное маленькое и очень умное устройство, практически со всеми умениями робота mBot2 и теми же блоками программирования.

Так что, если захотите создать свой пульт управления для mBot2 - пожалуйста))).
А мы далее покажем, как создаются сети и взаимодействуют устройства на основе CyberPi.
Pocket Shield под рукой нет, так что мы продемонстрируем проект на базе трех (или двух и более) роботов mBot2.
Группа команд управления сетью в mBlock5 представлена на рисунке ниже:
Как видите, можно устанавливать канал (шесть вариантов, так что в группе роботов могут существовать несколько подгрупп, соединенных разными сетями), передавать и получать сообщения, на основании которых совершать какие то действия, задаваемые программистом.
В качестве примера соберем программу для проекта - "Группа роботов-танцоров".
По условиям один робот будет организовывать сеть и командовать, остальные - "танцевать", перемещаясь с помощью моторов, издавая звуковые и световые сигналы".
При этом предусмотрим "взаимозаменяемость", т.е. любой робот из команды может выдавать команду, и тогда другие роботы начнут "танцевать".
Программа будет одинаковая для всех роботов в группе.
Проанализируйте программу.
При нажатии кнопки А - устанавливается сеть 6 между роботами.
При нажатии кнопки В робот отправляет сообщение, остальные роботы принимают его и начинают "танец".
По окончании танца можно нажать кнопку B на любом роботе, теперь он станет "дирижером" и остальные исполнят танец. И так далее)))
Посмотреть на "танец" можно в видеоролике на этом же канале.
Пробуйте, экспериментируйте. Вы можете создавать разные танцы, а также можете модифицировать программу так, чтобы подчеркнуть, как робот-дирижер руководит группой, задав ему какие-то движения.
Можете также попробовать вариант, при котором танцевать будут и роботы группы, и сам дирижер.
Пробуйте, это увлекательно!