
Аспирант политеха Данила Кленин работает над созданием универсальной системы адгезионного захвата на базе серийный клеевых составов. Она будет применяться в робототехнике и промышленности. Идея разрабатываемой системы заключается в том, чтобы дистанционно доставить устройство прилипания, пропитанное клеевым составом, к цели, сформировать прочное соединение и затем удерживать его или буксировать.
Как отметил политехник, существует несколько систем захвата: механические захваты и манипуляторы; сети, гарпуны и стропы; магнитные системы; вакуумные; электроадгезия и «сухие» гекко-поверхности; крио-/термозахваты. Ключевым преимуществом системы адгезионного захвата, над созданием которой трудится ученый вуза, является работа с «некооперативными» целями без проушин, ровных кромок и ферромагнитности. Она терпима к погрешностям наведения, может взаимодействовать с хрупкими и тонкостенными объектами, остается компактной и энергоэффективной за счет дозирования и управляемой активации клея.
Данила Кленин, аспирант ОмГТУ, специальность «Проектирование, конструкция, производство, испытания и эксплуатация летательных аппаратов»:
«Технология может быть внедрена в состав промышленных робототехнических систем (манипуляторов, автоматических комплексов), предназначенных для серийной эксплуатации в сложных условиях. Ее можно использовать в нестандартных задачах по перемещению и фиксации объектов, где невозможно применение штатных средств, например, в рамках оперативных, аварийных, временных или мобильных решений на открытых площадках, в агрессивных средах или нестабильных климатических условиях, а также в системах дистанционного захвата в космосе, в робототехнических комплексах МЧС и других экстренных служб для применения в зоне аварий и катастроф».
Принцип работы таков: устройство прилипания, предварительно пропитанное клеевым составом, выбрасывается в сторону цели, формирует контакт с ее поверхностью, после чего клей отверждается под действием внешних факторов (ультрафиолет, температура, вакуум). Это позволяет эффективно фиксировать объекты различной формы и состава в средах, где использование традиционных систем захвата невозможно или нецелесообразно. Серийные клеевые составы выбраны с целью удешевления производства системы – используются УФ-эпоксидные, термореактивные полиуретановые клеи-расплавы, цианоакрилаты, гибридные полиуретановые структурные, двухкомпонентные эпоксидные клеи.
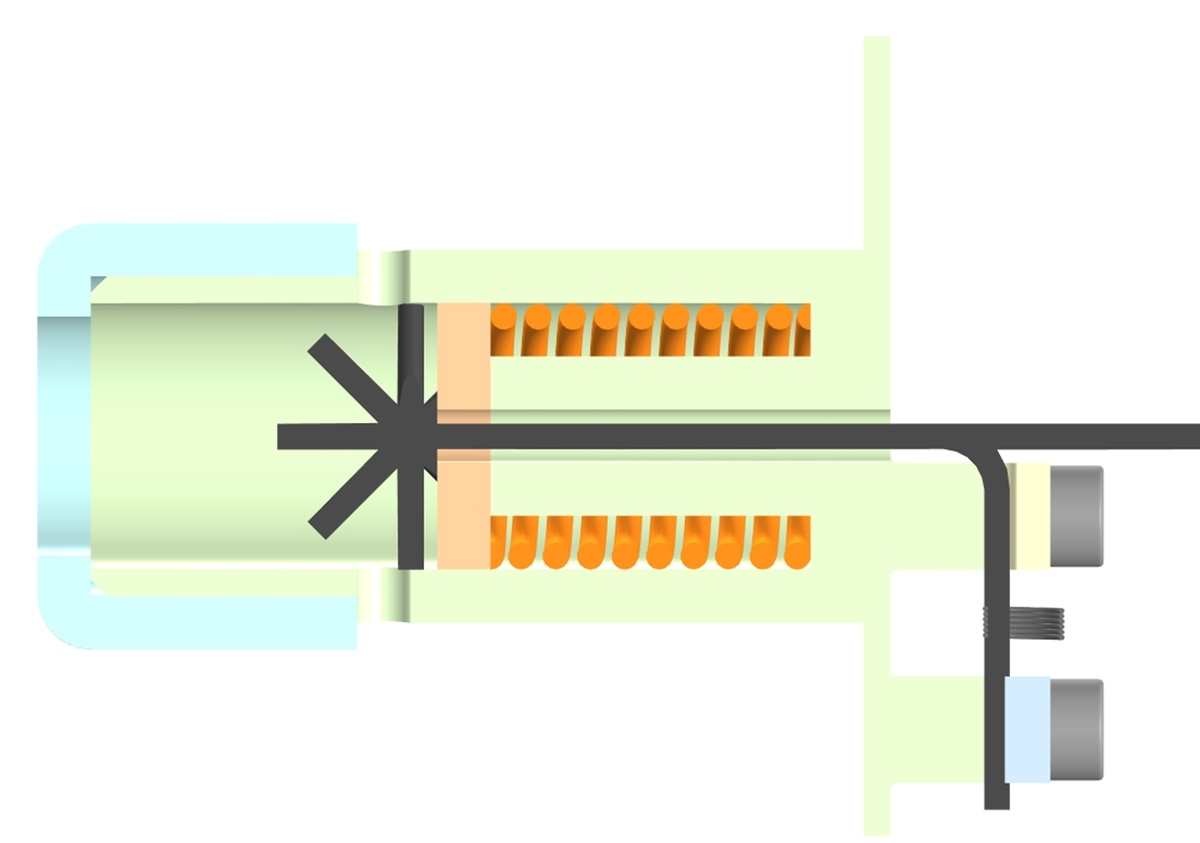
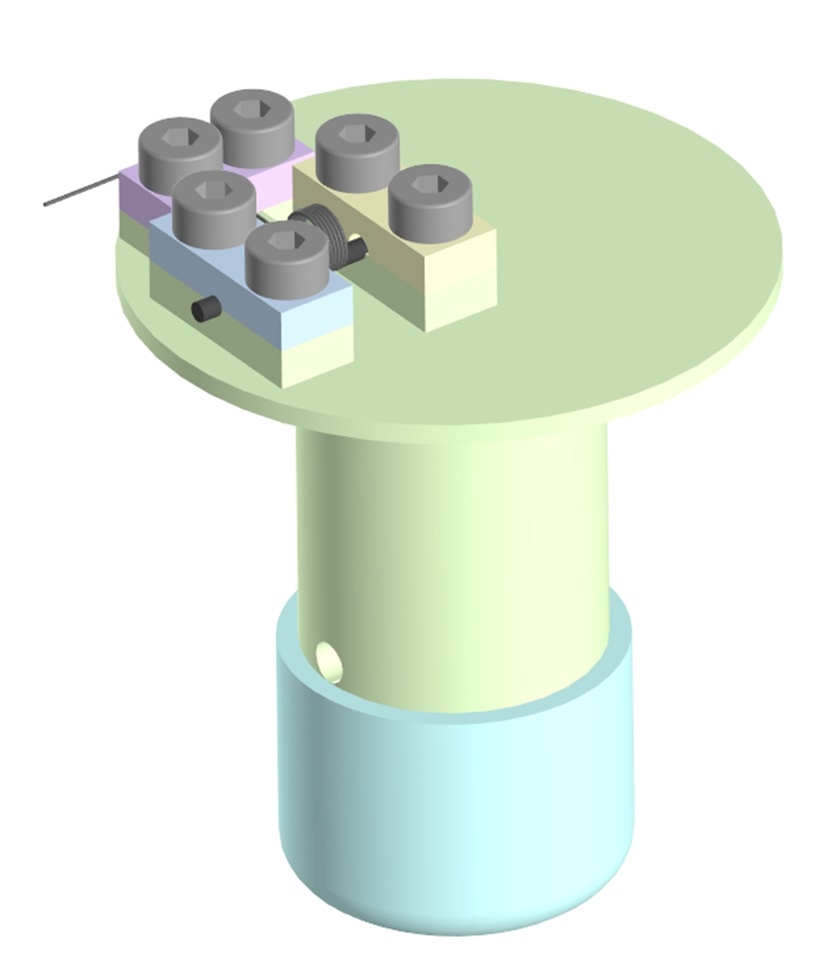
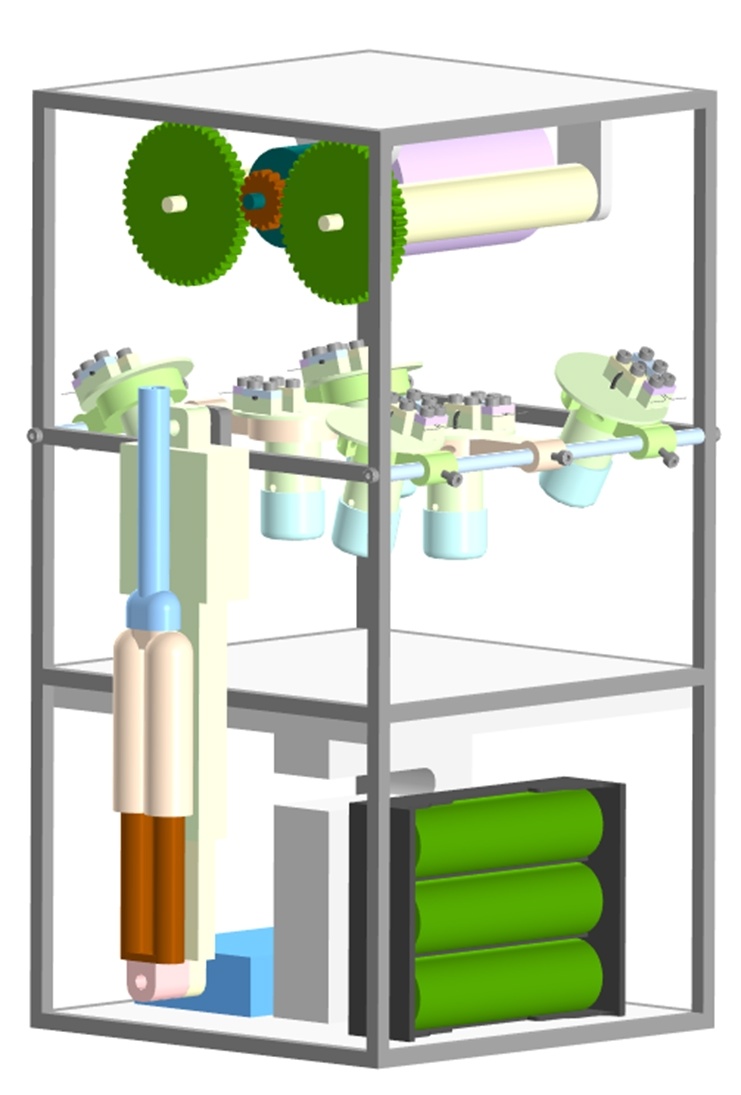
Ученые также активно работают над усовершенствованием системы – ее функциональной модульностью, повышенной эксплуатационной надежностью, компактностью, интеграбельностью, а также энергоэффективностью и расширением диапазона эксплуатационных условий. По словам политехника, архитектура устройства построена на взаимозаменяемых и стандартизированных узлах, что обеспечивает возможность масштабирования, быстрого технического обслуживания и интеграции в различные робототехнические и космические платформы. Конструкция оснащена системой термоактивируемого пуска и тензометрического контроля, что исключает несанкционированные срабатывания и гарантирует стабильную работу в автоматическом режиме, а ее силовые и управляющие элементы функционируют с низким энергопотреблением, обеспечивая высокую автономность и совместимость с автономными энергетическими контурами.
На сегодняшний день идет организационный запуск и подготовка лабораторной базы по плану: исследователи оформляют юридическую часть, докупают комплектующие и готовят лабораторный стенд. Следующим шагом в работе над проектом станет выбор клеевых композиций и CAD-проектирование системы выброса и устройства прилипания, а затем – изготовление, сборка первого прототипа и ряд экспериментов.
В этом году проект аспиранта получил 1 млн рублей, победив в конкурсе «Студенческий стартап» федерального проекта «Платформа университетского технологического предпринимательства». Средства пойдут на организацию юридической, технической и материальной базы для начала проектной работы, а также разработку, сборку и верификацию функционального образца системы дистанционного захвата с подтвержденной работоспособностью в прикладных условиях. Потенциальными заказчиками разработки могут стать интеграторы робототехники и автоматизации, а также частные и государственные производственные предприятия с внедрением автоматизированных решений.