В статье рассмотрены переходные процессы в асинхронном электродвигателе для нерегулируемого и регулируемого электропривода. Выявлены особенности прямого пуска и пуска с использованием частотного преобразователя. Проведен анализ и сравнение результатов математического моделирования. Показано, что применение частотно-регулируемого электропривода позволяет улучшить качество переходных процессов.
Введение
Электропривод, преобразующий электрическую энергию в механическую, требует эффективного управления, особенно в переходных процессах. Стратегия пуска двигателя является фундаментальной, определяя динамику системы и влияя на последующее регулирование скорости, момента и работу защит. Быстродействие, точность и надежность привода, критичные для безопасности и производительности, существенно зависят от характеристик переходного процесса. Целью настоящего исследования является сравнительный анализ ключевых параметров переходных процессов (пускового тока, момента, времени разгона) при прямом пуске асинхронного двигателя и при пуске с применением частотного преобразователя.
Имитационная модель разработана на ПО REPEAT. Для исследования асинхронного электропривода был выбран АДЧР-1250-0,66-6У1.
Прямой пуск
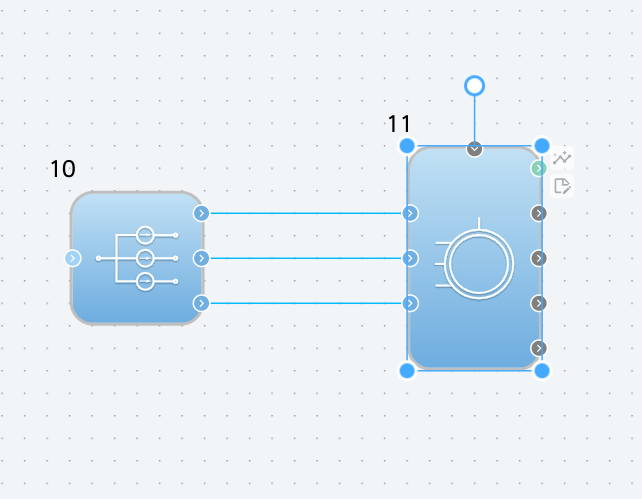
Основным методом пуска асинхронного электропривода с короткозамкнутым ротором во многих механизмах являлся прямой пуск. На рисунке 1 изображена схема прямого пуска в REPEAT.
Несмотря на простоту, рассматриваемая модель обладает существенными недостатками. Ключевой проблемой является чрезмерно высокая скорость нарастания оборотов двигателя при прямом пуске. Это вызывает значительные динамические нагрузки на механическую часть привода, что может привести к его повреждению или разрушению. Особенно критична данная особенность в подъемных механизмах: резкое ускорение и последующая остановка создают недопустимые перегрузки как для оператора внутри кабины, так и для транспортируемого груза, повышая риск травматизма и возможного разрушения груза. На рисунке 2 изображен график угловой частоты без нагрузки.
Кроме того, приложение нагрузки к двигателю, запущенному методом прямого пуска, вызывает значительную просадку скорости (рисунок 3). Это явление обусловлено мягкой механической характеристикой такого типа запуска. Ключевым недостатком прямого включения в сеть является невозможность плавного регулирования частоты вращения двигателя, что ограничивает его применение в системах, требующих точного управления скоростью и динамикой привода.
Прямой пуск асинхронного двигателя сопровождается кратковременным, но значительным броском пускового тока, в 5-8 раз превышающим номинальное значение (рисунок 5). Это явление способно вызвать просадку напряжения в питающей сети, особенно при высоком сопротивлении цепи или недостаточной мощности источника. Просадка напряжения негативно сказывается на работе другого чувствительного оборудования, подключенного к той же сети. Параллельно с этим, высокие динамические нагрузки (рисунок 4), возникающие при резком разгоне привода, создают ударные воздействия на механические элементы передачи (такие как ремни, зубчатые колеса, валы, подшипниковые узлы). Подобные ударные нагрузки приводят к преждевременному износу и сокращению расчетного срока службы этих компонентов.
Частотно-регулируемый электропривод
Рассмотрим вариант частотно-регулируемого электропривода. Модель собрана по системе ПЧ-Д (преобразователь частоты - двигатель)(рисунок 6).
Частотно-регулируемый электропривод (ЧРЭП) реализует плавный пуск электродвигателя за счет управляемого нарастания напряжения и частоты питающего напряжения. Ключевой функцией ЧРЭП является возможность регулирования скорости вращения двигателя посредством изменения частоты питающего напряжения, что обеспечивает адаптацию режима работы привода к текущей нагрузке. Важным преимуществом данного подхода является ограничение величины пускового тока в течение всего процесса разгона. Кроме того, система управления ЧРЭП предоставляет возможность программного задания требуемой скорости вращения и времени пуска двигателя. На рисунках 7,8,9 изображены динамические характеристики пуска электродвигателя.
Сравнение механических характеристик
На следующем рисунке приведены статические (механические) характеристики частотно-регулируемого электропривода и естественная характеристика двигателя. Из построенных графиков видно, что применение пропорционально-интегрального регулятора скорости в системе управления позволяет получить абсолютно жёсткую механическую характеристику. В случае применения пропорционального регулятора скорости скорость электродвигателя уменьшается с ростом момента электродвигателя. Ограничение выходного сигнала регулятора скорости позволяет, как видно из рисунка, ограничить величину момента электродвигателя.
Итог
Сравнительный анализ результатов моделирования прямого пуска и пуска с использованием частотно-регулируемого электропривода позволяет сформулировать следующие выводы:
- Пусковой ток при прямом включении в сеть значительно превышает значения, наблюдаемые при частотно-регулируемом пуске.
- Для прямого пуска характерны выраженные колебания момента двигателя в начальной стадии переходного процесса, которые отсутствуют при использовании ЧРЭП.
- Длительность переходного процесса при прямом пуске существенно больше, чем при пуске с применением ЧРЭП.
Таким образом, применение частотно-регулируемого электропривода обеспечивает существенное улучшение качества переходных процессов по сравнению с прямым пуском асинхронного двигателя.