Ранее мы узнали, что на борту mBot2 есть такое полезное устройство, как гироскоп. Даже посмотрели на значения, которые он выдает.
Сегодня попробуем осуществить проект, для которого возможности гироскопа вполне подходят - движение с сохранением курса. Представьте - мы отправляем робота по прямой, но что то ему мешает, например ветер, или его толкнули и т.д. А робот упорно будет возвращаться к заданному направлению! Интересно же!
Пробуем.
Для управляющих воздействий используем сравнительно простой, но эффективный регулятор - пропорциональный. Мы с ним уже встречались, так что принцип реализации таких регуляторов должен быть вам знаком.
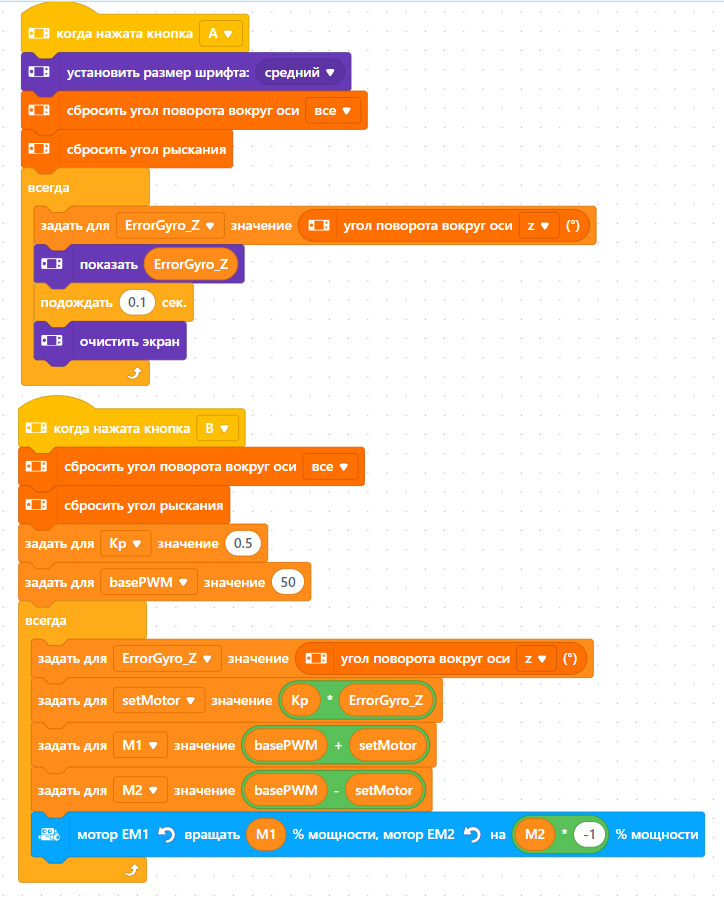
В программе предусмотрим вывод значений угла рысканья на экран (кнопка А), чтобы посмотреть, все ли у нас хорошо и работает ли гироскоп.
Далее кнопка B запускает основную программу. Обнуляются углы поворотов и рысканья, т.е. текущее положение робота и будет определять направление его движения. Далее мы будем считывать "Ошибку рысканья", т.е. отклонение от курса, записывать его в переменную ErrorGyro_Z и использовать в пропорциональном регуляторе для управления моторами.
Попробуйте программу в работе. Запустите робота кнопкой А, понаблюдайте за отображением цифр на экране. Запустите движение кнопкой B. Попробуйте сбить робота с курса. Обратите внимание, при каких условиях внешнего воздействия робот на курс не сможет вернутся. Оцените точность удержания курса.
Да, возможно результат не 100%, но робот достаточно уверенно держит курс, намного лучше, чем без использования гироскопа. Так что запишем данное умение в копилку наших возможностей при реализации сложных проектов!
В следующий раз разберемся с поворотами на заданный угол.