Сегодня поработаем над проектами с использованием ультразвукового датчика расстояния.
Ultrasonic Sensor 2 (УЗ датчик)
В данном случае будем говорить о комплектном УЗ датчике робота mBot2. Устроен он так же, как и большинство подобных датчиков. Передатчик слева излучает ультразвуковые волны, а приёмник справа принимает отражённые ультразвуковые волны. Ну и по времени задержки сигнала можно определять расстояния от препятствия до датчика. TX (Transmit) означает передатчик или передачу данных, а RX (Receive) означает приемник или прием данных.

Датчик от MakeBlock упакован в пластиковую защиту, что хорошо, т.к. часто это является требованием в спортивных дисциплинах. Да и сохранность датчика повышается.
Ну а симпатичная подсветка из 8 светодиодов, похожего на глаза робота, добавляет антуражности и эстетичности)))
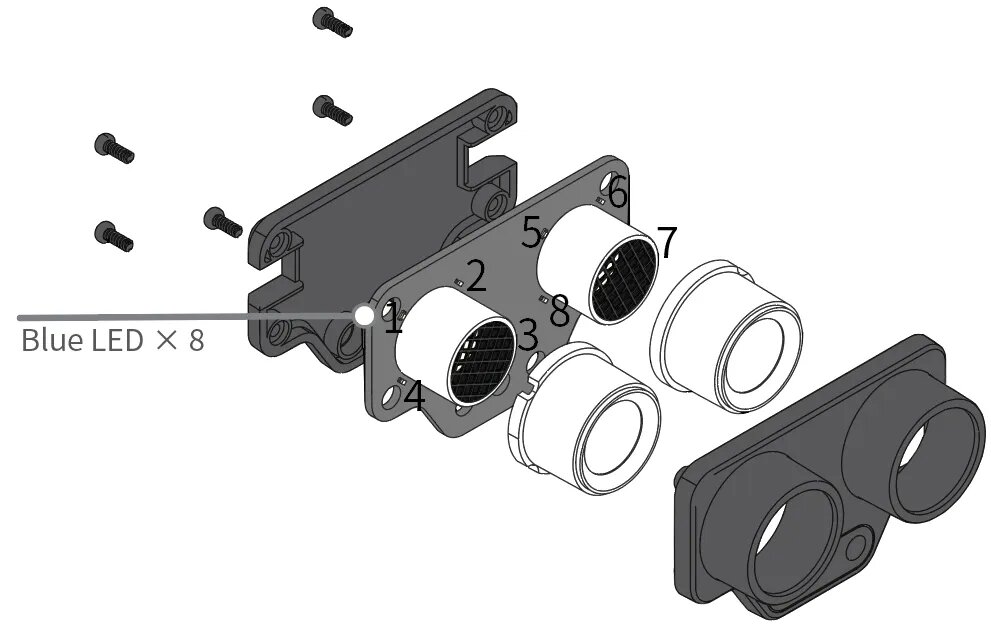
Кроме того, подсветкой можно управлять, так что и это можно использовать в проектах.
Подробнее о датчике - на странице разработчика. Там же примеры использования.
Проект "Держи дистанцию"
Для пробы создадим проект, в котором робот будет поддерживать определенную дистанцию от предметов впереди. Например 20 см. При уменьшении расстояния робот должен будет отъехать от препятствия, при увеличении - подъехать к нему.
И вначале используем простой релейный регулятор.
Сразу оговоримся, что лучше создать некий зазор - "мертвую" зону, в которой робот не будет реагировать на изменение расстояния. Иначе он слишком часто будет дергаться с движением. Пусть он начнет приближаться к объекту, если тот удалится на 22 см, а отъезжать - если приблизится на 18. И подсветку подключим, все симпатичнее будет).
Примерно так:
Попробуйте загрузить программу в робота и посмотрите, как она выполняется. Препятствием может быть и ваша рука, и любая коробка. Двигайте рукой к/от робота, наблюдайте за реакцией.
Можно поиграть с подсветкой. Посмотрите на блоки, придумайте варианты использования.
Интересно, когда есть несколько роботов. Тогда их можно запускать цепочкой)))
Пока все, в следующий раз подумаем, как сделать реакцию робота плавной. Т.е. усложним регулятор.