Quad RGB Sensor
В самом начале знакомства с mBot2 мы рассматривали датчик, входящий в его базовый комплект, Quad RGB Sensor, обеспечивающий возможность плавного движения по линии. Далее - RGB датчик.
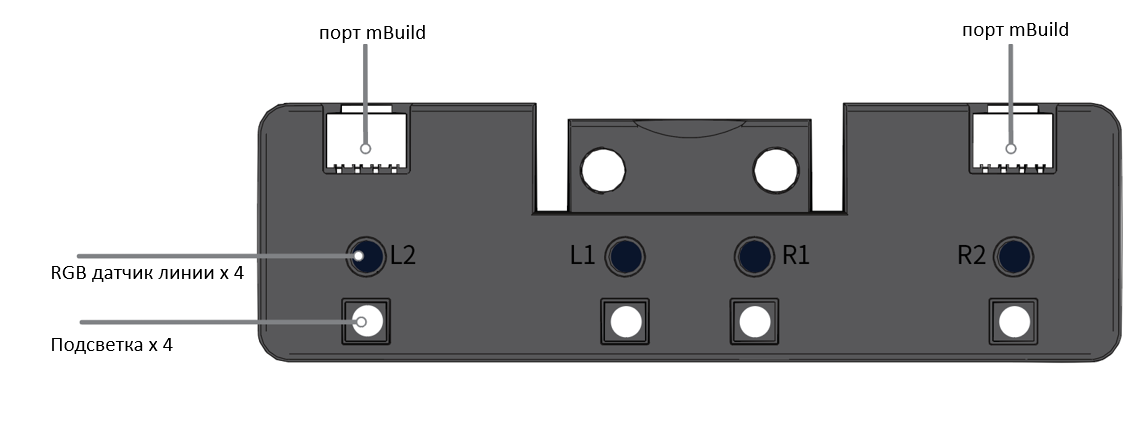
Датчик действительно интересный, выполнен в закрытом корпусе (а это требование целого ряда спортивных дисциплин). Датчик содержит четыре RGB датчика линии, которые позволяют обнаруживать роботу линии и цвета.
Кроме того, присутствует подсветка (заполняющий свет), что позволяет снизить уровень ложной идентификации. В функционал датчика входит и возможность калибровки в условиях конкретной линии и окружающего освещения, что позволяет понизить влияние окружающего света на работу робота на линии.
Детальная информация и рекомендации по использованию этого сенсора приведена на странице разработчиков https://education.makeblock.com/help/mbuild-quad-rgb-sensor/.
Очень советуем посмотреть и отработать все примеры, приведенные по данной ссылке и изучить приемы калибровки и выбора цвета подсветки датчика. Да, материалы - на английском языке, но вполне можно разобраться, там множество графической информации, ну и никто не отменяет использование перевода страницы.
Базовая калибровка
В качестве примера покажем базовую настройку.
Включили робота, поставили его, расположив датчики над линией. В данном случае задача не тривиальна, используем в качестве поля детские маты-пазлы, с наклеенной черной изолентой, или нанесенной по трафарету краской линией. Мы уже давно используем такую технологию, причем линия нанесена с двух сторон, с одной широкая, с другой узкая. На изображениях есть прямые линии, перекрестки, повороты, так что можно быстро собрать какое-то интересное поле для занятий. И хранить легко.
Но поля - разноцветные! И освещение бывает разное. Как тут бедному роботу сориентироваться?
Ставим датчики над линией, смотрим:
Вооот, уже видно, что сейчас он вроде как линию определяет, т.к. над линией датчики не горят, а рядом (там где синий фон) горят. Но перемещаем его в другую сторону и видим (фото ниже), что левый датчик правильно не горит над линией, два центральных хорошо определили фон и горят, а вот правый должен вроде как гореть, а он не горит, как будто под ним опять же линия. Это значит, что на дистанции робот начнет путаться в показаниях датчиков. Исправляется как раз калибровкой.
Для базовой калибровки используется двойное нажатие на кнопку на RGB датчике (рис. 1, кнопка – сверху, по центру).
Разместите четыре датчика освещенности RGB-датчика на фоне и дважды нажмите кнопку на датчике (светодиоды начинают быстро мигать), а затем смещаем робота с датчиками из стороны в сторону над фоном и линией, пока светодиоды не перестанут мигать и начнут правильно (а вы уже знаете, как должно быть) загораться и гаснуть. Процедура длится пару секунд. Если светодиоды начнут медленно мигать, это значит, что система не разобралась в ваших линиях/фонах и требуется провести обучение заново.
Длительное нажатие: при длительном нажатии кнопки переключается цвет подсветки. Как правило, менять цвет не требуется. Цвет устанавливается автоматически после обучения.
Дополнительные сведения: если требуется ездить по линии, на которой есть желтые сегменты, то калибровку лучше проводить над ним. Т.е. мы выбираем участок линии с меньшей контрастностью между фоном и линией.
Пробуем с нашим роботом. Результаты ниже:
смотрим, вроде все правильно, три датчика над фоном горят, датчик над линией не горит. Проверяем другие положение:
Все отлично, датчики работают правильно и робот готов ехать по черной линии с голубым фоном.
Но переносим на фрагмент с красным фоном и датчики опять тупят((((см.ниже).
Нам придется заново провести обучение, и тогда результат вновь нас порадует.
Да, для обычных условий мы теперь ездим по полям из одного типа пазлов, благо обычные для соревнований линии чаще всего проще - черные на белом). Как быть с полями с разными условиями калибровки, подумаем позже.
Это был только один пример калибровки! Еще раз рекомендуем познакомиться с материалами на странице разработчиков.
Пока все. Робот готов ехать по линии, но ему ж еще надо объяснить "как" это делать. Т.е. создать программу. Поговорим об этом в следующем материале. Удачи!