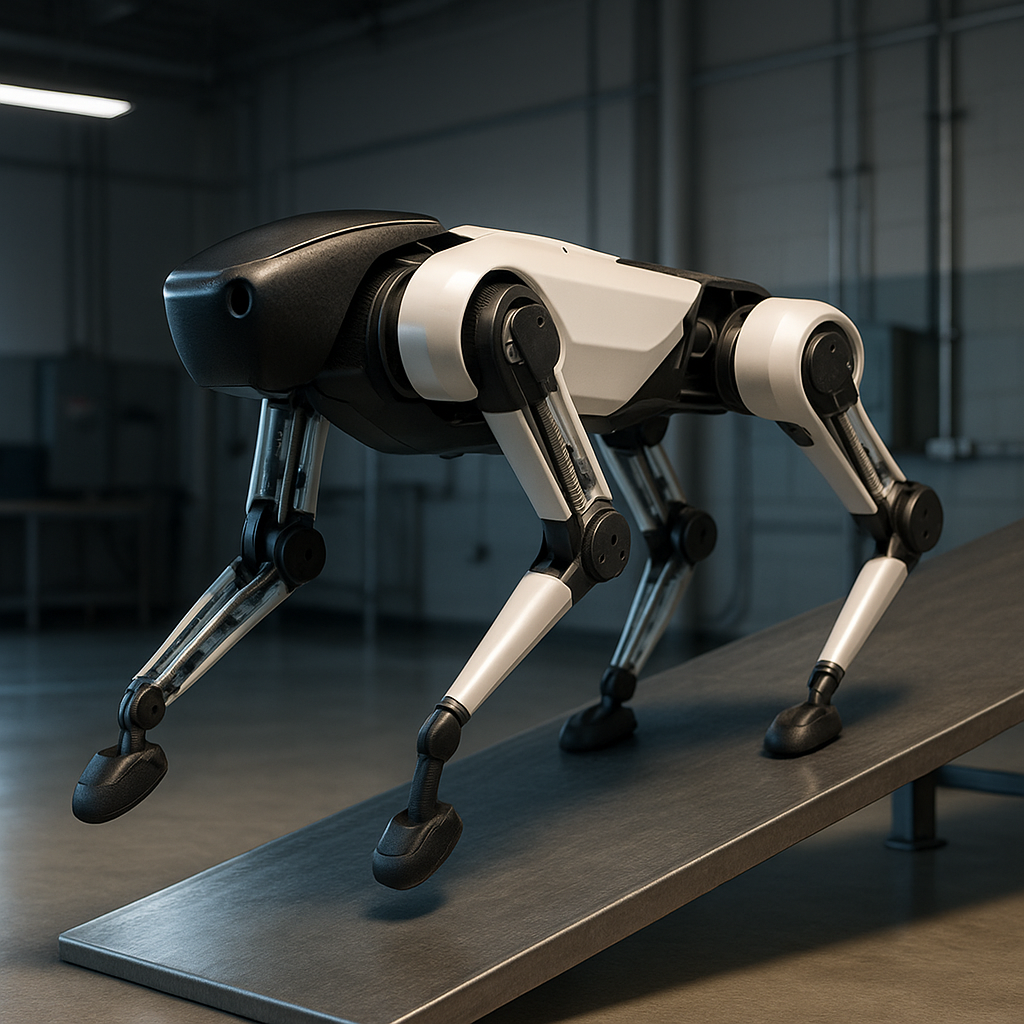
Представьте робота-собаку, способного грациозно перемещаться по наклонной поверхности без шума и вибраций, точно и плавно ставя свои механические лапы на землю. Звучит фантастически? Однако это уже реальность благодаря инновационному роботу CARA, созданному инженером Аэдом Мусой.
🦾 Что особенного в CARA?
Главная изюминка CARA скрыта внутри её суставов. Вместо традиционных шестерён и ремней робот использует специальные канатные приводы — так называемые Capstan drives. В этих приводах движение передаётся с помощью канатов, что полностью устраняет люфт и обеспечивает беспрецедентную точность.
🔍 Почему это важно?
Представьте, что обычные шестерни в роботах — это грубые инструменты, способные к погрешностям. Канатный привод — словно тонкий хирургический инструмент, обеспечивающий высочайшую точность без «дрожания». Благодаря этому CARA движется практически бесшумно и чётко, словно настоящий живой организм.

⚙️ Технические хитрости реализации
Создание точных канатных приводов оказалось задачей не из простых. Чтобы получить идеальное соотношение оборотов (8:1), Аэду пришлось пройти через ряд экспериментов:
🧵 Проблема измерения канатов
Сложность заключалась в том, что диаметр каната менялся под нагрузкой. Поэтому инженер сначала создал две тестовые конструкции с близкими, но неточными соотношениями:
- 📏 7.912:1 и 📐 8.213:1
Используя линейную интерполяцию, удалось вычислить точные параметры и создать привод с идеальным соотношением 8.000619:1. Подобная ювелирная точность прежде не достигалась в подобных системах.
🐾 Конструкция ног
Робот обладает уникальными 5-звенными ногами, что редко встречается в мире четвероногих роботов. Почему именно такая конструкция?
- ⚖️ Равномерное распределение нагрузки – ноги равномерно распределяют усилия, снижая износ деталей.
- 📦 Компактность – 5-звенная нога занимает мало места и позволяет роботу маневрировать даже на тесных участках.
- 🌟 Уникальность – редкая технология, привлекающая внимание энтузиастов и инженеров.
Для моторов используются бесщеточные двигатели BLDC с низким профилем и контроллеры ODrive, а точность движений обеспечивают магнитные энкодеры.
🖥️ Программное обеспечение
CARA управляется микроконтроллером Teensy 4.1 и использует следующие алгоритмы управления:
- 🎯 Гоминг (Homing) – автоматическое калибрование суставов при запуске.
- 🎓 Кинематика – расчёт траектории движений с помощью обратной и прямой кинематики, позволяющей ногам плавно двигаться.
- 🌀 Циклоидальная походка – специальный алгоритм, позволяющий роботу двигаться максимально естественно и эффективно.
- 🛡️ Стабилизация – CARA может удерживать равновесие на неровной поверхности и восстанавливать устойчивость после толчков.
🚧 Что ещё предстоит улучшить?
Несмотря на продуманность конструкции, создатель CARA уже видит направления улучшения:
- 🔋 Аккумулятор – планируется увеличение ёмкости и напряжения батареи для большей автономности.
- 🥾 Материал ступней – TPU оказался слишком мягким и быстро изнашивается, поэтому следующим шагом может стать использование силикона или других износостойких материалов.
- 🤖 Автономность и дополнения – внедрение лидаров, камер и колес, которые позволят роботу выполнять различные задачи без постоянного управления человеком.
💡 Личное мнение автора статьи
Проект CARA вдохновляет тем, что показывает совершенно иной подход к конструированию роботов. В эпоху, когда большая часть разработок стремится к упрощению и удешевлению, подход с канатными приводами кажется рискованным, но одновременно прорывным. Интересно наблюдать, как сочетание инженерного творчества и высокой точности производства позволяет создавать механизмы, которые напоминают живые организмы. CARA выглядит и движется настолько естественно, что за ней хочется наблюдать и изучать её движение часами.
🌐 Подробнее ознакомиться с проектом CARA можно здесь:
Именно такие нестандартные решения и эксперименты двигают робототехнику вперёд, приближая будущее, где роботы будут неотъемлемой частью нашей повседневной жизни. 🚀✨