Имитация разнообразия
биологических тканей
в новом методе
мономатериальной печати.
Мощный рывок гепарда, гибкое скольжение змеи или ловкий захват человека — всё это стало возможным благодаря слаженной работе мягких и твёрдых тканей. Мышцы, сухожилия, связки и кости работают сообща, обеспечивая энергию, точность и диапазон движений, необходимых для выполнения сложных движений, характерных для всего животного мира.
Воспроизвести такое разнообразие опорно-двигательного аппарата в робототехнике крайне сложно. Мы сочетаем мягкие и жёсткие структуры в наших попытках подражать естественным опорно-двигательным системам дабы обеспечить их столь же разнообразным механическим поведением — одновременно адаптивным и точным. Одним из наших излюбленных способов создания мягко-жёстких роботов стала 3D-печать с использованием нескольких материалов, которая действительно заметно приблизила на с к заветной цели. Однако такой подход означает, что жёсткость или несущая способность — ключевые свойства — не могут непрерывно контролироваться во всей структуре робота.
Сегодня команда Инженерной школы EPFL (Федеральный политехнический институт Лозанны) под руководством профессора робототехники Джозефины Хьюз из Лаборатории проектирования и изготовления вычислительных роботов (CREATE) разработала инновационное геометрическое решение этой проблемы, базирующееся на одном единственном материале — пене. Из неё методом той же трёхмерной печати можно получить решётчатую структуру, сочетающую в себе разнообразие биологических тканей с роботизированным управлением и точностью.
В исследовании, опубликованном в Science Advances, авторы объясняют, что решётка, изготовленная из простого вспененного материала, состоит из отдельных блоков (ячеек), которые могут быть запрограммированы на различную форму и положение. Эти ячейки могут принимать более миллиона различных конфигураций и даже комбинироваться для получения бесконечных геометрических вариаций. Отмечается, что благодаря разработке новых подходов к геометрическому проектированию элементарных ячеек в решётчатых структурах, учёным удалось точно регулировать жёсткость и анизотропию — разницу свойств объекта в зависимости от направления структуры его материалов и воспринимаемых им нагрузок.
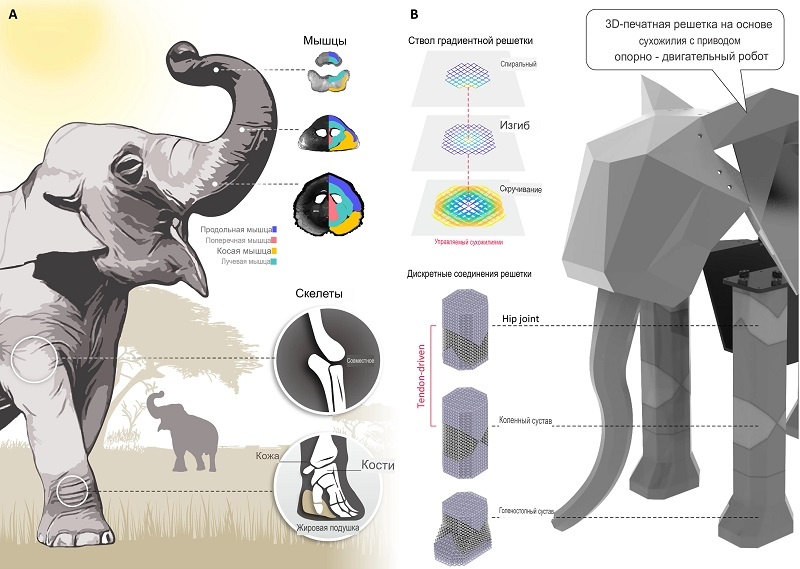
«Мы использовали нашу программируемую решётчатую технологию для создания основанного на опорно-двигательном аппарате слоноподобного робота с мягким хоботом, умеющим изгибаться, наклоняться и поворачиваться, а также с более жёсткими тазобедренными, коленными и стоповыми суставами, — рассказывает научный сотрудник EPFL Цинхуа Гуань. — Это показывает, что наш метод предлагает масштабируемое решение для создания беспрецедентно лёгких и адаптируемых роботов».
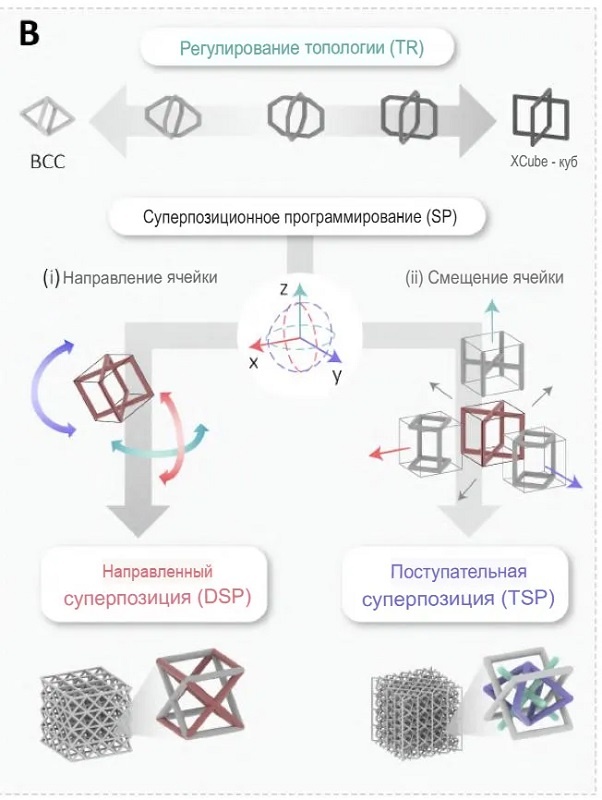
Итак, программируемую решётку можно напечатать с использованием двух основных типов ячеек с разной геометрией: объёмно-центрированной кубической (на рисунке ниже — BCC) ячейки и X-куба. При использовании каждого типа ячеек для печати объёмной роботизированной «ткани» полученная решётка будет иметь разные свойства: жёсткость, способность к деформации и несущую способность. Однако сам новый метод лаборатории также позволяет печатать решётки из гибридных ячеек, форма которых находится в любом диапазоне между означенными вариантами.
«Такой подход обеспечивает непрерывное пространственное смешивание профилей жёсткости и позволяет создавать бесконечное количество смешанных элементарных ячеек. Он особенно хорошо подходит для воспроизведения структуры мышечных органов, таких как хобот слона», — говорит аспирант Бенхуэй Дай.
Помимо изменения формы каждой ячейки, их можно поворачивать и сдвигать каждую вдоль её оси. Этот факт позволяет их накладывать друг на друга и программировать расположение в решётке, чем создаются совершенно новые комбинации; причём в этом случае вы придаёте полученной решётке гораздо более широкий спектр механических свойств. Например, куб из решётки с четырьмя наложенными друг на друга ячейками может иметь около 4 миллионов возможных конфигураций, а с пятью ячейками — более 75 миллионов!
Фигура слона в качестве моделирования была выбрана неслучайно — чтобы воспроизвести движения этого животного, нужно было сымитировать несколько различных типов тканей с уникальным диапазоном движений для каждой. Скользящий плоский сустав стопы, одноосный коленный сустав-сгибатель, двунаправленный двухосный сустав-сгибатель пальцев ног и даже сложные движения мускулистого хобота — двойное программирование позволило справиться со всеми поставленными задачами. С хоботом, правда, пришлось пойте на хитрость, разделив решётки на отдельные секции: для скручивания, сгибания и вращения соответственно. Тем не менее, метод обеспечил столь плавные и непрерывные переходы между ними, что все целевые движения этой пятой слоновьей конечности получились вполне рабочими.
То, что получившийся конструктор позволяют создавать трёхмерные структуры с изменяющимися в пространстве механическими свойствами, сулит немалое упрощение производства различной робототехники. И податливость, характерная для мягких тканей, и «костяная» жёсткость вкупе с их способностью выдерживать нагрузку, — всё это, заключённое в один материал, найдёт массу применений и в медицине, и далеко за её пределами. Однако горизонты профессора Хьюз куда как ближе: для начала можно поработать над модификациями вспененного материала и исследованиями ячеек новой формы. Что же до захватывающих возможностей новой технологии вспененной решётки, то поле её применения действительно широко, особенно в области робототехники.
«Как и в случае с сотами, соотношение прочности и веса решётки может быть очень высоким, что позволяет создавать очень лёгких и эффективных роботов, — отмечает исследователь. —Открытая структура вспененного материала хорошо подходит для движения в жидкостях и даже позволяет включать в структуру другие материалы, например датчики, для повышения интеллектуальных возможностей вспененных материалов».