Исследователи из Университета Карнеги-Меллон (Carnegie Mellon University) продемонстрировали возможность управления отдельными пальцами роботизированной руки в реальном времени с помощью неинвазивного интерфейса мозг — компьютер на основе ЭЭГ.
Ученые разработали технологию, позволяющую декодировать намерение выполнить отдельные движения пальцами и передавать команды на роботизированную руку. В будущем эту систему смогут использовать люди с инвалидностью — без рискованных хирургических операций.
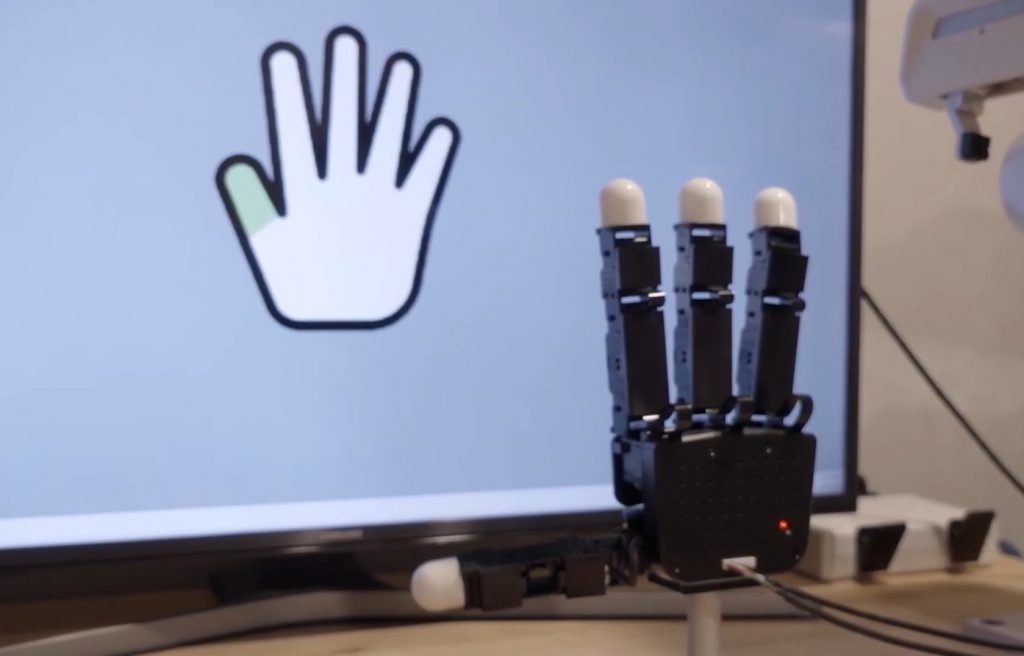
Испытуемые успешно управляли двумя и тремя пальцами робота, просто думая о соответствующих движениях. Интерфейс анализировал сигналы электроэнцефалографии и преобразовывал их в команды для управления рукой.
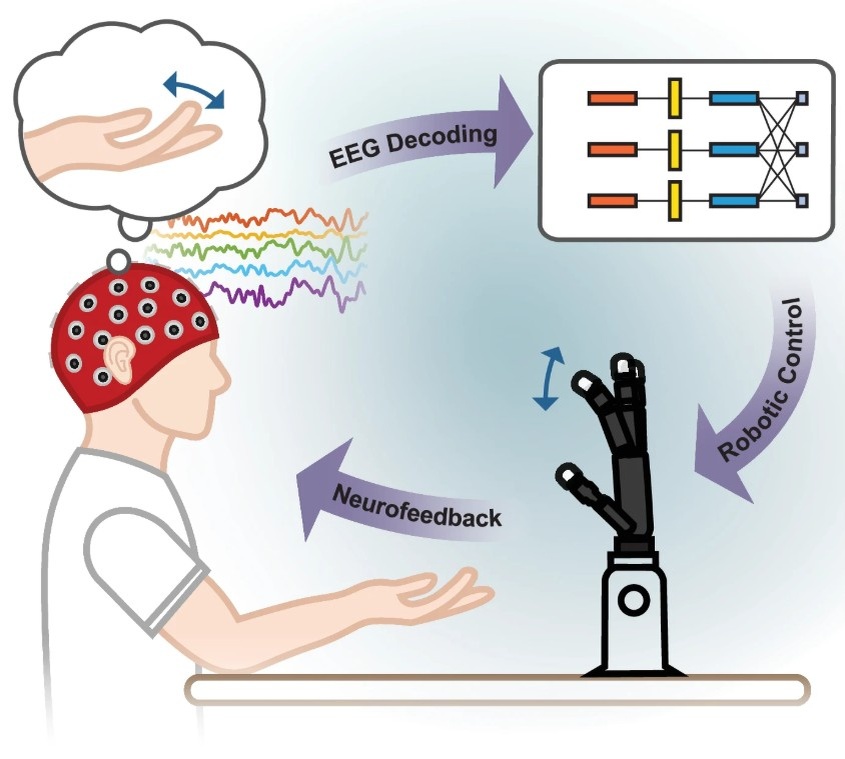
Иллюстрация технологии. Изображение: Yidan Ding et al., Nature Communications
Основная проблема неинвазивных интерфейсов — ограниченное пространственное разрешение ЭЭГ, которое затрудняет декодирование мелкой моторики в реальном времени. Чтобы преодолеть эти ограничения, ученые применили систему на основе глубокого обучения и механизм персонализированной настройки под конкретного пользователя.
Управление пальцами роборуки на основе декодирования ЭЭГ
Преимущество неинвазивных систем по сравнению с имплантами, над которыми, например, работает Neuralink Илона Маска, заключается в том, что они не требуют операции на мозге и постоянного медицинского обслуживания. Хотя импланты обеспечивают высокую точность, их применение ограничено людьми с тяжелыми заболеваниями и связано с серьезными рисками.
Неинвазивные интерфейсы, напротив, могут быть доступны сотням миллионов людей с различными формами двигательных нарушений. Исследователи уже планируют дальнейшую работу: следующий шаг — научить систему выполнять более сложные действия, например, печатать на клавиатуре силой мысли.
Читать далее:
Наша Вселенная прибыла из другого мира: теория мироздания оказалась неверна?
Сверхзвуковой «Конкорд» возвращается: почему в США поменяли мнение о самолете
Вирус герпеса перестраивает геном человека, но есть способ его остановить
На обложке: кадр из демонстрационного видео