Пространственно-плоскостное взаимодействие сознания с внешним миром в нейролокомоторике боевых искусств Востока для разработки роботизированных систем принципиально нового типа – гуманоидного иммуноандроида как техноиммуносистемы
© Авторы, 2019
© ООО Издательство «Радиотехника», 2019
Н.В. Панов – лаборант, лаборатория функциональной нейроцитологии, Федеральное государственное бюджетное учреждение науки Институт высшей нервной деятельности и нейрофизиологии РАН (Москва)
E-mail: nikolay.panov1966@yandex.ru
И.Б. Комков – тренер спортивного клуба "КАНКУ", ТиНАО (Москва).
E-mail: ikomkov@mail.ru
А.В. Савельев – к.филос. наук, ст.науч.сотрудник, нач. патентного агентства «©Уникально честное патентование», научный координатор постоянного семинара «Нейрофилософия», философский факультет, МГУ им. М.В.Ломоносова; уч.секретарь постоянного семинара «Управление знаниями», факультет государственного управления, МГУ им. М.В.Ломоносова, главный инженер ВМЗ по менеджменту и качеству
E-mail: gmkristo@yandex.ru
Н.С. Косицын – д.б.н., профессор, заслуженный деятель науки РФ, гл. науч. сотрудник, лаборатория функциональной нейроцитологии, Федеральное государственное бюджетное учреждение науки Институт высшей нервной деятельности и нейрофизиологии РАН (Москва)
E-mail: nikolay.kositzyn@mail.ru
Н.А. Логинова – к.б.н., ст. науч. сотрудник, лаборатория функциональной нейроцитологии, Федеральное государственное бюджетное учреждение науки Институт высшей нервной деятельности и нейрофизиологии РАН (Москва)
E-mail: nadinvnd@yandex.ru
В данной работе приведены результаты исследования механо-физиологических основ боевых искусств Востока. Проанализированы случаи взаимодействия эндогенных плоскостей скелета человека с экзогенными плоскостями, устанавливаемыми сознанием человека. Использование данного подхода позволяет установить дополнительные ограничения на все возможные движения. Это упростит организацию целенаправленного движения с учетом изменяющихся условий среды и будет способствовать снижению количества необходимых степеней свободы, что позволит перевести современную робототехнику в новое поколение на качественно более высокий уровень, максимально приближающийся к биосистемам.
Ключевые слова: робототехника, боевые искусства, взаимодействие плоскостей, иммуноандроид, техноиммуносистема, нейролокомоторика, эндогенные и экзогенные плоскости, сознание, внешний мир
This paper presents the results of a study of the mechano-physiological foundations of the martial arts of the East. The cases of the interaction of endogenous planes of the human skeleton with exogenous planes established by human consciousness are analyzed. Using this approach allows you to set additional restrictions on all possible movements. This will simplify the organization of purposeful movement, taking into account the changing environmental conditions and will help reduce the number of necessary degrees of freedom, which will translate modern robotics in new generation to a qualitatively higher level, as close as possible to biosystems.
Keywords: robotics, martial arts, interaction between planes, immunoandroid, technoimmunosystem, neuro-dredge motor, endogenous and exogenous planes, consciousness, external world
Введение
При математическом моделировании движений в робототехнике основное внимание уделяется учету некоторых динамических и статических характеристик, принимая во внимание основные трудности появляются из-за большой подвижности узловых точек. Именно поэтому проблема организации движения в робототехнике является актуальной задачей. Кроме того, робот может одновременно совершать только n-е количество операций, и оптимизация процесса важна для решения такой проблемы. Для корректного конструирования систем управления в робототехнике принято рассматривать несколько контуров управления, в частности, стратегический и тактический уровни [1]. Они способны управлять разными типами движений, начиная от врожденных стереотипных движений (ходьба, бег и т.д.), и заканчивая выученными движениями (например, в спорте и искусстве).
Также Миомир Вукобратович ставил вопрос об увеличении степеней свободы, учитывая, что у человека насчитывается свыше 600 мышц, кроме того, принимая во внимание наличие синовиальных суставов [2].
Рассматривалась также перспектива разработки коллективных нейролокомоторных биотехнических систем, в частности механически связанной системы экзоскелетононов с целью совершенствования бионических аппаратов, ускорения обучения спортсменов, медицинской реабилитации, увеличения грузопоъёмности экзоскелетонов, в военных целях [3, 4].
Цель работы. Рассматриваются условия, задачей которых является установление контакта робота с внешним пространством путём моделирования нейролокомоторных свойств биологических систем для того, чтобы обеспечить возможность правильного принятия решений и перевести локомоторику существующих робототехнических систем на качественно иной более высокий уровень, сопоставимый с живыми организмами.
Примером для такого установления взаимодействия с окружающим пространством может служить пример организации движений в боевых искусствах Востока. Ранее в наших работах были описаны способы построения движений в боевых искусствах, основанные на принципах первого и второго порядка [5, 6]. Движения, соответствующие этим принципам, могут объединять роботов любой конструкции, гораздо на более тонких принципах, чем в [3], и гуманоидных андроидов, а также быть общим звеном между гуманоидным андроидом и человеком. Также соответствие принципам можно определить как «технический иммунитет», или «техноиммуносистему», так как речь идет не о копировании движений, а о правиле их построения на основе осознанного выбора, исходящего из диапазона ситуаций. Выбор любого движения мы можем назвать осознанным, поскольку он отбирается из всего массива возможных действий на основе анализа компонентов внешней среды и не допускает использование паттерна движений, находящихся в противоречии с выполняемым действием. Эти правила ориентированы на соблюдение логики второго порядка. Таким образом, иммунизированный робот любого типа становится иммуноандроидом, что также является принципиально новым поколением роботов.
1. Представление об эндогенных плоскостях
Рассматривая с точки зрения механики построение некоторых движений в разных системах, следует обратить внимание на отличия, где важную роль играет строение скелета человека. Также особо важно учитывать принципы построения движений [6]. Если рассматривать строение скелета человека применительно к его суставам, то с точки зрения геометрии, они образуют горизонтальные плоскости относительно вертикальной оси, которые мы будем называть эндогенными плоскостями. К таким суставам относятся: голеностопный (articulatio talocrucalis), коленный (articulatio genus), тазобедренный (articulatio coxae), плечевой (articulatio humeri), локтевой (articulatio cubiti) и суставы запястья. С точки зрения плоскостей, в которых происходят движения в этих суставах, данную конструкцию можно определить как многоуровневую систему. В этой системе позвоночный столб представляет собой вертикальную ось, а суставы находятся в эндогенных плоскостях, расположенных перпендикулярно по отношению к вертикальной оси (рис. 1).
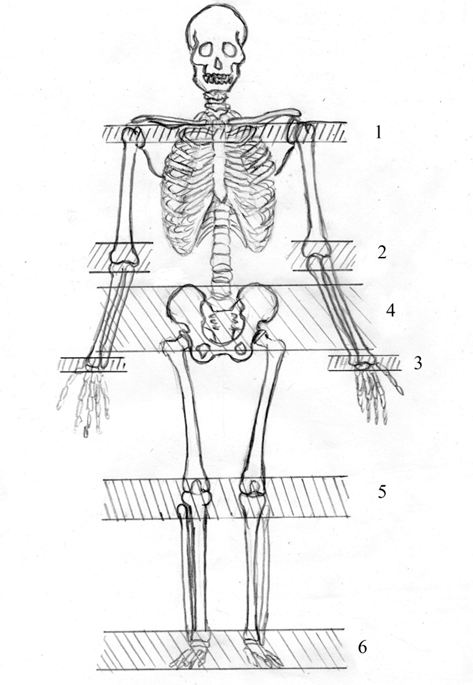
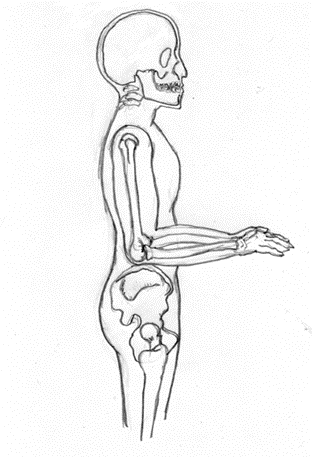
Если человек из положения стоя согнет руки в локтях под прямым углом параллельно земле, то они окажутся в районе гребешка подвздошной кости (crista iliaca) (рис. 2). Иными словами, локтевые суставы (плоскость 2, см. рис. 1) будут лежать в плоскости на уровне таза (плоскость 4, см. рис. 1).
2. Представление о плоскостях, в которых происходит движение в суставах
Итак, мы разобрали шесть основных (см. рис. 1) горизонтальных плоскостей скелета человека. Они являются динамичными эндогенными плоскостями относительно окружающего пространства и располагаются вдоль вертикальной оси скелета. Рассматривая полученную систему плоскостей, можно заметить, что количество плоскостей имеет четное число, а именно шесть. То есть с точки зрения плоскостей скелет человека делится на верхнюю и нижнюю часть.
Так же каждый сустав имеет свои оси, в которых он способен совершать движения.
Эндогенные плоскости являются некой воображаемой опорой. Справедливо будет назвать опорными частями скелета локтевые суставы, коленные, ладони, голеностоп, стопы, кости таза, так как ими можно упереться в материальный твердый предмет. Таким образом, создается достаточно прочная конструкция, которая состоит из двух элементов: скелета человека и опорного предмета. Проводя аналогию между некоторыми системами, можно увидеть, что в каратэ при стойке дзэнкуцу-дати локтевые суставы буквально упираются в воображаемую опорную плоскость района костей большого таза (плоскость 4, рис. 1). В результате имеется возможность создать прочную статическую конструкцию, необходимую для этой системы. В кикбоксинге, например, локти свободны. Свобода локтей необходима в кикбоксинге для того, чтобы была возможность создать многоуровневое вращение, которое является одним из принципов этой системы [6], поэтому кикбоксер буквально повисает на плоскости плечевого пояса, как на турнике (рис. 3). Получается, что кисти рук кикбоксера статичны, а локти находятся в движении.
3. Необходимость создания жесткой системы на примере каратэ
При выполнении любых движений человек действует в ближайшем минимально необходимом пространстве, которое удовлетворяет его анатомии и соответствует ему. Для достижения большего эффекта и продуктивного взаимодействия с окружающим пространством необходимо наличие посредника. Таким посредником выступает куб и оси, проходящие через него (рис. 4). Этот куб выделяется из общего пространства при помощи ограничений. Куб соответствует осям и плоскостям человека (фронтальной, горизонтальной и сагиттальной), а также имеет дополнительные плоскости и таким образом состоит из передней (фронтальной), задней (тыловой), двух боковых (латеральных), верхней и нижней плоскостей. В результате получается куб, внутри которого организуется пространство (рис. 4).
Куб сам по себе является достаточно устойчивой фигурой. Внутри этого искусственного пространства человек, ориентированный по его основным плоскостям, может совершать обычные движения внутри него, однако для полноценного взаимодействия с искусственно организованным пространством требуется более прочная и надежная конструкция. Внедрение вспомогательных элементов в виде воображаемых плоскостей как своеобразного экзоскелета, позволяют правильно ориентировать движения человека в таком пространстве в соответствии с его анатомией. Внутри куба можно провести две вертикальные плоскости (фронтальная и сагиттальная) и две диагональные плоскости (рис. 5), проходящие через вертикальную ось ОО1.
Другие плоскости могут проходить через центральную дорзо-вентральную ось ОО1 (рис. 6).
Следовательно, в каждом из случаев (рис. 4-6) куб оказывается поделенным на восемь равных частей. Образовавшаяся конструкция является прочной и жесткой. Она обеспечивает человеку надежное взаимодействие с искусственно созданным пространством. Образовавшиеся плоскости внутри куба являются эндогенными по отношению к кубу, но экзогенными по отношению к плоскостям скелета человека (рис. 1). Образовавшиеся плоскости куба являются постоянными и не зависят от условий внешней среды. В итоге совокупность эндогенных плоскостей скелета должна создать конъюнкции с экзогенными плоскостями данного куба.
Система, способная работать на взаимодействии жестких экзогенных плоскостей куба с эндогенными плоскостями скелета человека, также обладает свойствами жесткости, а значит, и живучести.
4. Представление о нерабочих областях
Вышеупомянутая жесткая система (рис. 4-6) образовала рабочие плоскости куба. Они являются рабочими, так как позволяют взаимодействовать с образовавшимся пространством. В итоге получаются жесткие плоскости под прямыми углами и углами в 45°. В каждой плоскости куба можно обнаружить проекции плоскостей. Пример такой плоскости представлен на рис. 7. В данном случае проекции плоскостей изображены в виде отрезков АС, BD, EG и FH, пересекающиеся в точке О. Все множество плоскостей, проходящих через точку О и не совпадающих с указанными отрезками, образуют «нерабочие» плоскости. Рабочие плоскости определяются анатомическим строением и взаимным расположением мышц и суставов. Предполагается, что для того, чтобы удержать груз на вытянутой руке, затрачивается меньше усилий, если рука отведена под углом, который соответствует рабочей плоскости, что следует из физики гравитационных взаимодействий.
В спорте этот недостаток пытаются восполнить за счет физической силы. Однако это не дает возможность определить рабочие грани куба, что может затруднить построение движений в соответствии с принципами.
Подобным образом между эндогенными плоскостями расположены области, требующие защиты. Их также пытаются дополнительно защитить с помощью мышечного каркаса (так называемой «железной рубашки»).
5. Разные варианты работы эндогенных и экзогенных плоскостей
5.1. Работа в эндогенных и экзогенных плоскостях на примере простого движения в каратэ («правило взаимодействия»)
В системе каратэ конъюнкция между экзогенными и эндогенными плоскостями возможна только в том случае, если горизонтальная плоскость скелета человека будет согласовываться с вертикальной плоскостью куба (рис. 8).
Система каратэ один из своих принципов (принцип момента), держит в строго горизонтальной плоскости, благодаря жесткой фиксации динамического центра в вертикальной оси [6]. Такие принципы боевых искусств Востока, как распорка и момент, создающие систему каратэ, базируются на логике второго порядка, созданной системой ограничений второго порядка. Эти ограничения привносят, своего рода, функцию торможения в поведении иммуноандроида. Также они жестко контролируют эндогенную среду системы, нейтрализуя зарождающиеся в ней, противоречащие программы и алгоритмы несоответствия, тем самым не допуская выполнение движений, идущих в противоречие с установленными принципами, и пресекают попытки проникновения чужеродных программ и соответственно алгоритмов из экзогенной среды, тем самым формируя «технический иммунитет». Таким образом, создается интегрированная, технически иммунизированная система, в которой большая роль отведена функции торможения [7, 8]. В связи с этим прослеживается организация постоянства среды «технический гомеостаз». Такая концепция относится ко всем боевым искусствам Востока, так как образованы они логикой второго порядка и все имеют присущие им принципы. Для иммуноандроида, эти логические принципы, могут представлять собой некий код, с помощью которого будет обеспечена взаимосвязь с системой. В противном случае, система, отказываясь от взаимосвязи с реципиентом, выводит его на (логику первого порядка), защищаясь тем самым от незаконного вторжения. Таким образом может быть реализована модель «подсознания» и «сознания» системы, то есть своеобразная «нейросистема».
У куба рабочие экзогенные плоскости вертикальны (две фланговые (боковые) плоскости, фронтальная и тыловая – см. рис. 4). Для того, чтобы была возможность работать одновременно в двух перпендикулярных друг другу плоскостях, в систему внедрен один из принципов логики второго порядка – принцип распорки. Он создает условия для работоспособности принципа момента в горизонтальной плоскости, через согласование с вертикальной плоскостью. В этом случае система удовлетворяет жесткой конструкции воображаемого куба, обеспечивая с ним контакт. Именно согласование распорки с вертикальной рабочей плоскостью куба не только дает возможность взаимодействия с ней, но и создает условия для функционирования принципа момента в горизонтальной плоскости. Таким образом, обеспечивается стабилизация общей системы. Момент, как малое вращение вокруг оси позвоночника, приводит к результату только в том случае, если он позвоночник будет двигаться исключительно в горизонтальной плоскости. Поэтому если движение вперед происходит по строго горизонтальной линии (атака в каратэ), то противоречий не возникнет. Итак, данная согласованность с помощью принципа распорки позволяет обеспечить свойство жесткости общей конструкции, где взаимодействуют эндогенные и экзогенные плоскости, перпендикулярные друг другу. Это позволяет консолидировать иммуноандроид с окружающим его пространством.
Движения в каратэ прямолинейны, поскольку распорка согласует взаимодействие только с одной рабочей плоскостью куба (рис. 8). Остальные плоскости куба являются вспомогательными (рис. 5, 6).
При необходимости целесообразно переменить стойку и установить взаимодействие с другой плоскостью. Взаимодействие возможно так же при отклонении распорки относительно рабочей плоскости на 45°, однако при таком смещении, эффективность распорки несколько теряется, но компенсация возможна за счет взаимодействия с диагональной плоскостью куба. При организации взаимодействия с плоскостью куба, расположенной под углом 90°, распорка фактически отсутствует. Её компенсирует соответствующая плоскость. Следует так же отметить еще одну особенность стойки Дзэнкуцу-дати. Она имеет форму конуса (рис. 10). Как упоминалось выше, эндогенные плоскости скелета человека, обладают динамическим качеством. Это качество не только дает им возможность совершать вращательные движения вокруг вертикальной оси в горизонтальной плоскости, но и отклоняться от этой плоскости. Для системы каратэ это неприемлемо. Конус стремится укрепить плоскости скелета в строго горизонтальном расположении, и контролирует любые попытки их колебания в вертикальной плоскости. Это предает системе еще большую надежность. Так же конус имеет характерную особенность фиксации своей заостренной верхней части с другими плоскостями. Эта часть конуса обладает наименьшей площадью соприкосновения, которая в данном случае упирается в ростральный отдел куба, что обеспечивает ему подвижность в строго горизонтальной плоскости вокруг вертикальной оси. В то время, как противоположная часть конуса является надежной платформой, для каудальной части куба она тем самым, обеспечивает прочную неподвижную опору. Таким образом, полученная общая стереометрическая конструкция создает систему, способную к согласованию и выполнению условий логики второго порядка (техноиммуносистема), для жесткого (в системе каратэ) взаимодействия с пространством.
5.2. Работа за счет эндогенных плоскостей при минимальном участии экзогенной плоскости на примере кикбоксинга и винчуня («правило преобладания»)
При построении движений в кикбоксинге не обязательно выстраивать взаимодействие с экзогенными плоскостями куба, так как кикбоксинг работает на двух принципах, а именно импульса и многоуровневого вращения, что может быть реализовано исключительно за счет работы эндогенных плоскостей. Однако рабочей для него является фронтальная плоскость куба, а оси симметрии делят её для образования рабочих плоскостей под прямыми углами и углами в 45° (рис. 7). Рабочими векторами, изображенными на рис. 7, являются OB, OF, OA, OE, OD, OH, и OC.
Система винчунь, построена на двух принципах: «липкие руки» и «одновременности» [7]. Это позволяет системе работать фактически на эндогенных плоскостях, как своих, так и соперника. Рабочими экзогенными плоскостями системы атакующего и реципиента служат плоскости ABCD, OE1H1O1 и A1B1O1O (рис. 5).
5.3. Взаимодействие эндогенных и экзогенных плоскостей на примере тайцзи («правило суммации»)
Техника тайцзи основывается на двух принципах: маятника и «великого перехода». В тайцзи для правильной реализации принципа маятника необходима разработка позвоночного столба и всех суставов скелета. Принцип «Великого перехода», возможно, реализуется через рабочие плоскости куба (в тайзци все плоскости куба являются рабочими). Сфера призвана привнести равновесие между экзогенными плоскостям куба и эндогенными плоскостями скелета человека. Следственно, через преобразованную таким способом систему куба, а именно своеобразным «сглаживанием» углов куба, которые к тому же, являются своего рода узлами, обнаруживается возможность полной утраты границ между системой и организмом. Все точки на поверхности сферы, в отличие от куба, равноудалены от центра. К тому же она, не имея плоскостей, и как следствие границ, стремится к состоянию, которое может быть определено как эффект «гармонии». То есть переход от плоскостного режима куба, к взаимодействию со сферическим режимом, способствует развитию гармонии узловых точек скелета с пространством, что и можно назвать «Великим переходом».
В перспективе предполагается разработка серии БИВ («боевые искусства Востока») алгоритмов, программного обеспечения, устройств и систем гражданского и военного применения. В частности, в первой очереди планируется создание следующих объектов:
РБГИ-1 – Робот Боевой Гуманоидный Иммунизированный (на основе искусственного скелета человека);
РБГС-1 – Робот Боевой Гуманоидный Суррогат (на основе биологически внедряемого материала);
Таким образом, предложенная методология, обладая высокой степенью общности и универсальности, открывает принципиально новые направления как в робототехнике, так и медицине, биологии, искусственном интеллекте, нейрокомпьютерах и тд.
Из всего вышесказанного следует, что взаимодействие эндогенных плоскостей (скелета), с экзогенными плоскостями куба, формируемых сознанием человека, происходит в соответствии с определенными правилами.
При анализе некоторых видов боевых искусств Востока были выделены следующие правила: правило взаимодействия, правило преобладания и правило суммации.
Введение понятия плоскостей применительно к построению движений оказывается существенным, так как позволяет наложить дополнительные ограничения на всю совокупность возможных движений уменьшить количество степеней свободы, которые необходимо учитывать при программировании (или построении) движений.
Приведённые результаты многолетних исследований и практической деятельности позволяют перевести разработку, в том числе, робототехнических систем на качественно иной, значительно более совершенный уровень.
Это может способствовать значительному продвижению как в технологических автоматических робототехнических комплексах, так и в области военных приложений.
Литература
1. Юревич Е.И. Основы робототехники: учеб.пособие. 4-е изд., перераб. и доп. СПб.: БХВ-Петербург, 2017. 304 с.
2. Вукобратович М. Активная экзоскелетная система и начало развития человекоподобных роботов // http://rudocs.exdat.com/docs/index-45422.html
3. Патент РФ № 2118147. Устройство для облегчения ходьбы и переноски грузов / А.Г. Жуков, А.В. Савельев. 29.06.1994.
4. Савельев А.В. Кооперативная нейромеханическая робототехника // Нейрокомпьютеры: разработка, применение. 2019. № 5. С. 21-28.
5. Федулов М.В., Панов Н.В., Логинова Н.А., Косицын Н.С. Логическая регуляция движений и анализ совместимости систем на примере тхэквондо и каратэ // Нейрокомпьютеры: разработка, применение. 2017. № 5. С. 36-38.
6. Федулов М.В., Панов Н.В., Логинова Н.А., Савельев А.В., Косицын Н.С.Использование нейролокомоторных принципов построения движений на примере боевых искусств // Нейрокомпьютеры: разработка, применение. 2017. № 8. С. 41-43.
7. Федулов М.В., Панов Н.В., Логинова Н.А., Косицын Н.С. Использование искусственно вводимых сознанием человека правил построения движений для повышения эффективности боевых искусств // Нейрокомпьютеры: разработка, применение. 2016. № 12. С. 77-84.
8. Шульгина Г.И. Торможение поведения. Издательство: ИИнтеЛЛ. 2016. 347 с.
Plane interaction of consciousness with the outside world in the neurolocomotor martial arts of the East for develop new fundamentally type of robotic systems - humanoid immunoandroid as a techno-immunosystem
© Authors, 2019
© Radioteknika, 2019
N.V. Panov – assistant, Laboratory of Functional Neurocytology, Institute of Higher Nervous Activity and Neurophysiology of RAS (Moscow)
E-mail: nikolay.panov1966@yandex.ru
I.B. Komkov – a coach in the sports club “KANKU”, Troitsk (Moscow).
E-mail: ikomkov@mail.ru
A.V. Savelyev – Ph.D. (Philos.), Senior Research Scientist, Director of the Patent agency “©Uniquely honest patenting”
E-mail: gmkristo@yandex.ru
N.S. Kositsyn – Dr.Sc. (Biol), Professor, Honored Scientist of Russian Federation, Chief researcher, Laboratory of Functional Neurocytology, Institute of Higher Nervous Activity and Neurophysiology of RAS (Moscow)
E-mail: nikolay.kositzyn@mail.ru
N.A. Loginova – Ph.D. (Biol), Senior Scientist, Laboratory of Functional Neurocytology, Institute of Higher Nervous Activity and Neurophysiology of RAS (Moscow)
E-mail: nadinvnd@yandex.ru
Purpose of the work: conditions are considered, the task of which is to establish contact of the robot with the external space by simulating the neuro-motor properties of biological systems in order to ensure correct decision-making and transfer the locomotor system of existing robotic systems to a qualitatively different higher level comparable to living organisms.
We have analyzed the movement construction in several martial arts and concluded that there was common principle which included interaction between endogenous planes (formed by joints) and exogenous planes (formed consciously). Their usage implies different rules such as the rule of interaction, the rule of predominance and the rule of summation. They help to set limits on all voluntary movements and provide the purposeful movements. We expect that such approach can help in solving the problems of movement organization in robotics.
From the above, it follows that the interaction of endogenous planes (skeleton), with exogenous planes of the cube, formed by human consciousness, occurs in accordance with certain rules.
When analyzing certain types of martial arts of the East, the following rules were highlighted: the rule of interaction, the rule of predominance and the rule of summation.
The introduction of the concept of planes in relation to the construction of motions turns out to be significant, since it allows imposing additional restrictions on the entire set of possible motions to reduce the number of degrees of freedom that must be taken into account when programming (or constructing) motions.
The results of years of research and practice allow us to transfer the development of robotic systems to a qualitatively different, much more perfect level.